实验6:轨迹跟踪仿真1
文件内容
spawn_car.launch
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<include file="$(find car_model)/launch/spawn_xacro.launch">#引入文件
<arg name="x" value="0.0"></arg>#为文件中的元素赋值
<arg name="y" value="0.0"></arg>
<arg name="z" value="0.0"></arg>
<arg name="urdf_robot_file" value="$(find car_model)/urdf/smart.xacro"></arg> #定义小车模型位置
<arg name="robot_name" value="smart"></arg> #定义小车模型名称
</include>
</launch>
spawn_xacro.launch
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="x" default="0.0"></arg>#设置元素默认值
<arg name="y" default="0.0"></arg>
<arg name="z" default="0.0"></arg>
<arg name="urdf_robot_file" default=""></arg>
<arg name="robot_name" default=""></arg>
<!-- <param name="robot_description" command="$(arg urdf_robot_file)"/> -->
<param name="robot_description" command="$(find xacro)/xacro '$(arg urdf_robot_file)' roboname:='smart'" />#获取机器人模型
%% 创建节点 %%
<node name="spawn_model" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen" args="-urdf -x $(arg x) -y $(arg y) -z $(arg z) -model $(arg robot_name) -param robot_description"></node>
</launch>
具体实验
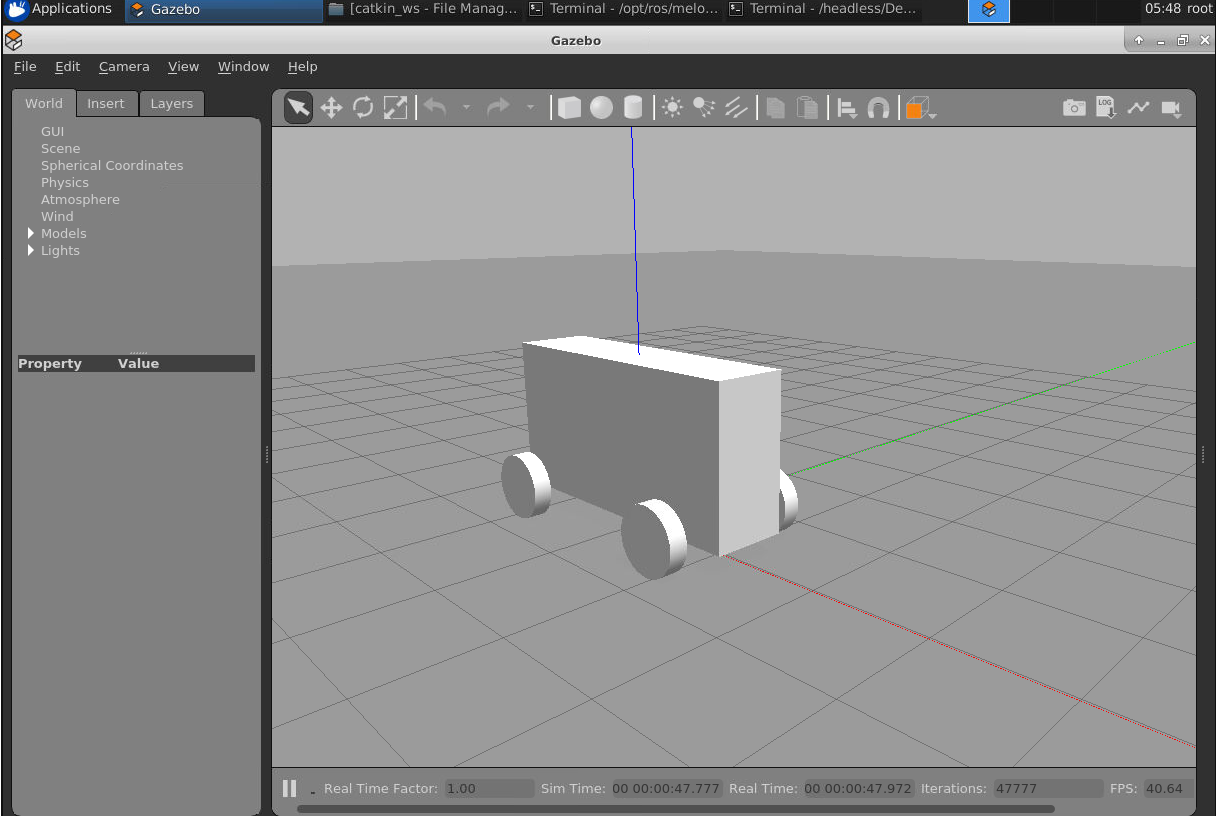
插入模型
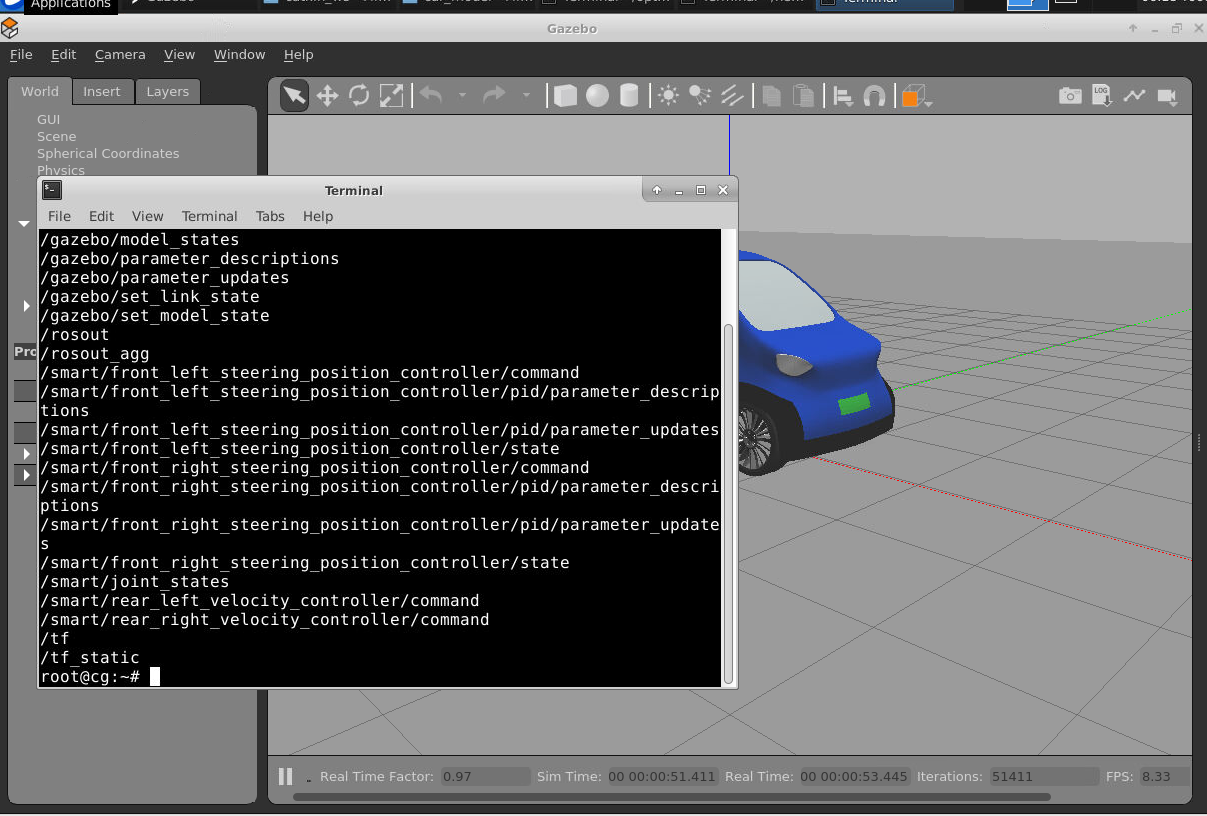
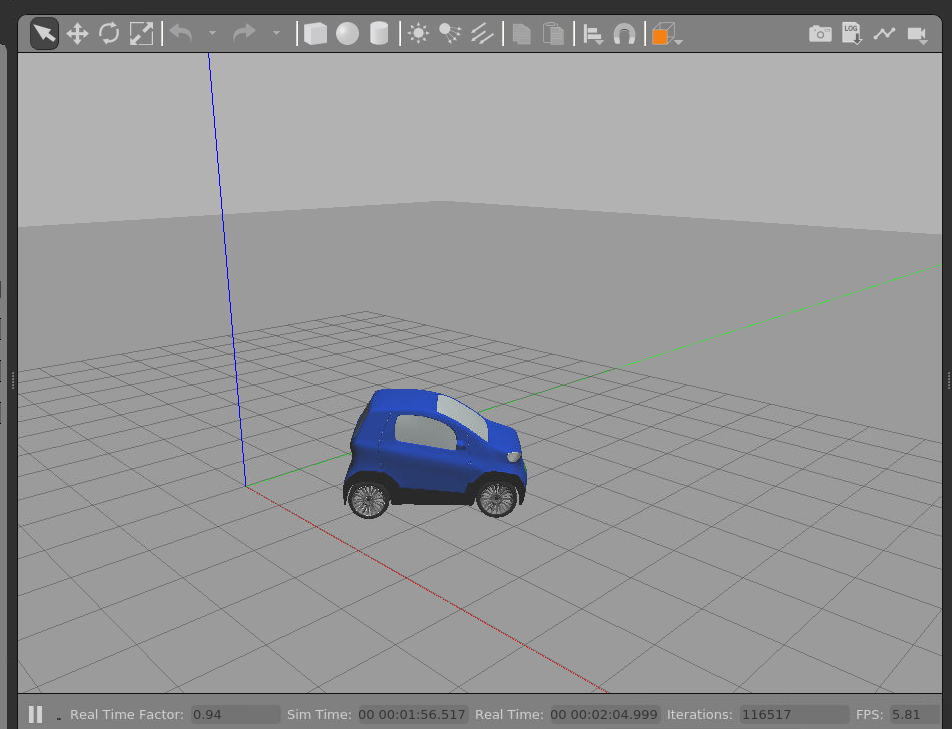
美化小车

控制小车
右轮偏转0.5弧度

控制小车速度和转向
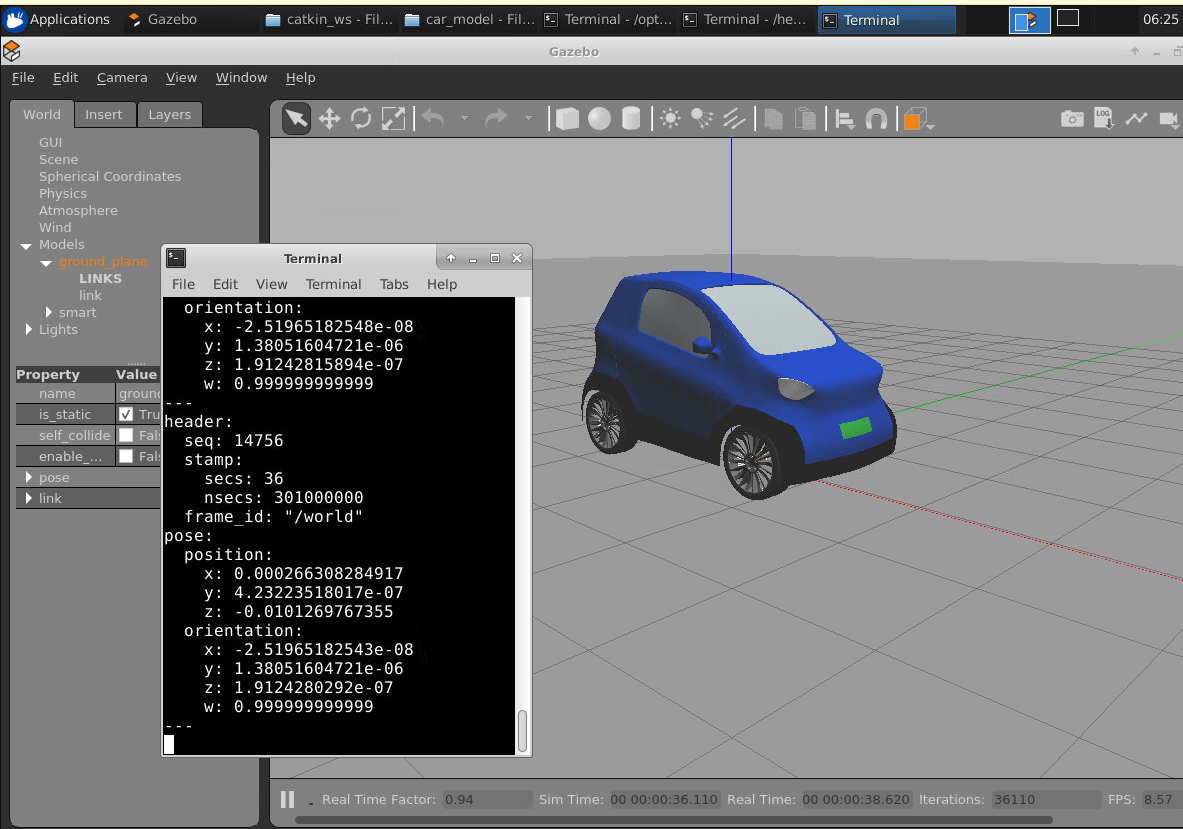
查看小车定位
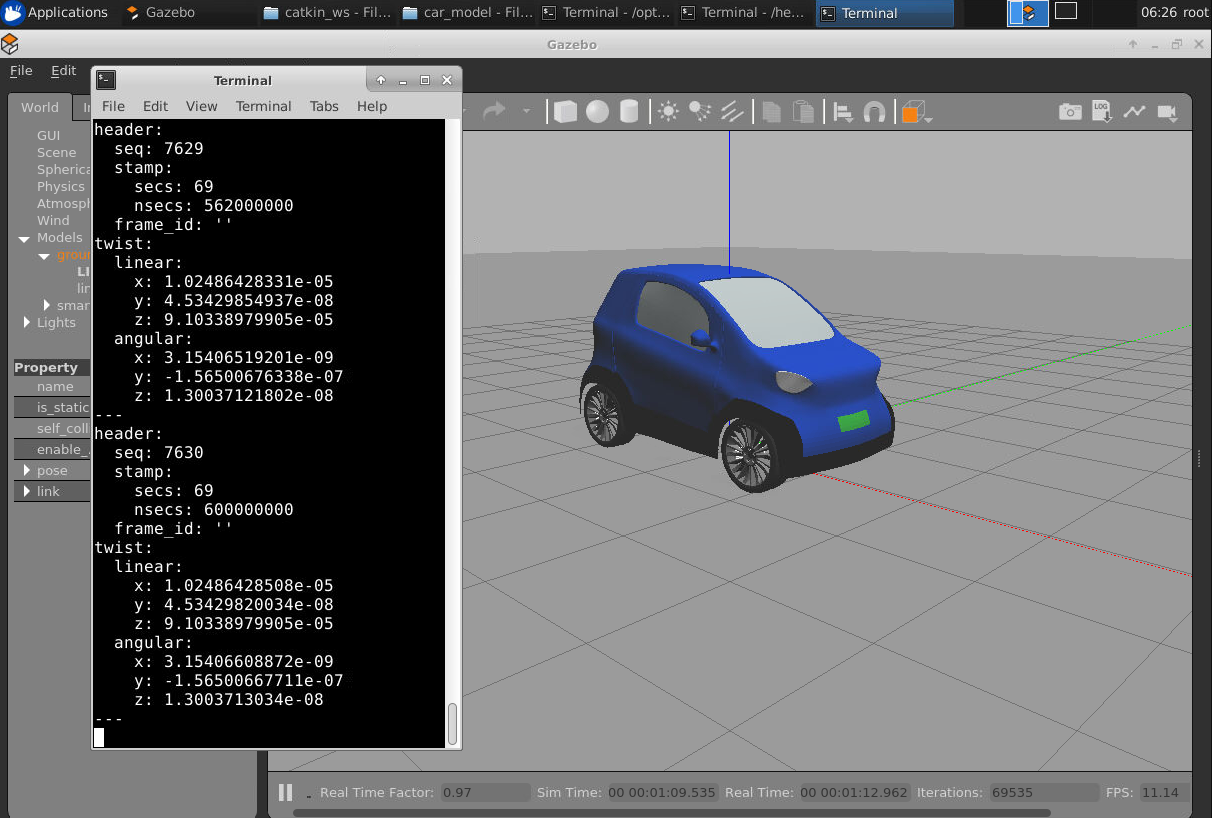
查看小车速度
This line appears after every note.