实验4:ros2智能移动机器人
实验一: ROS2移动机器人设置
实验二:ROS2移动机器人仿真
在gazebo默认环境的空世界测试虚拟TurtleBot3
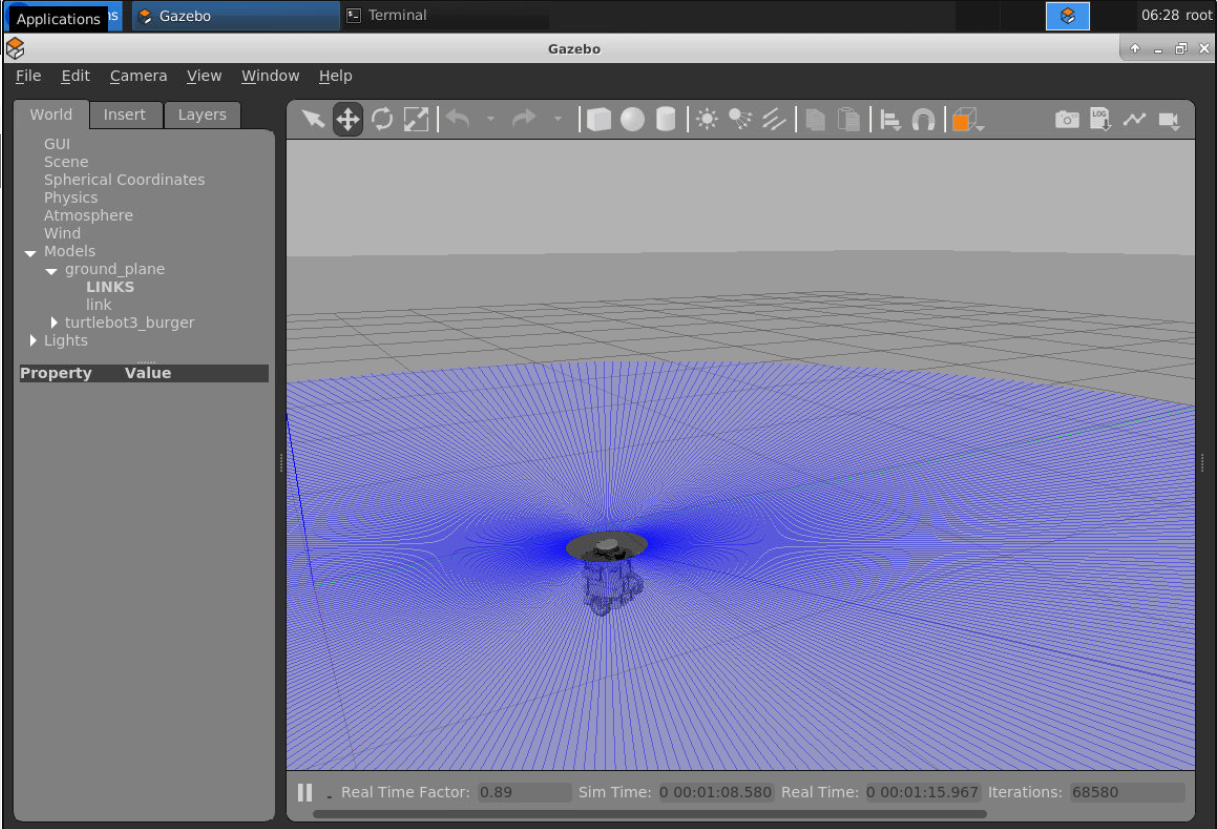
运行 TurtleBot3 world
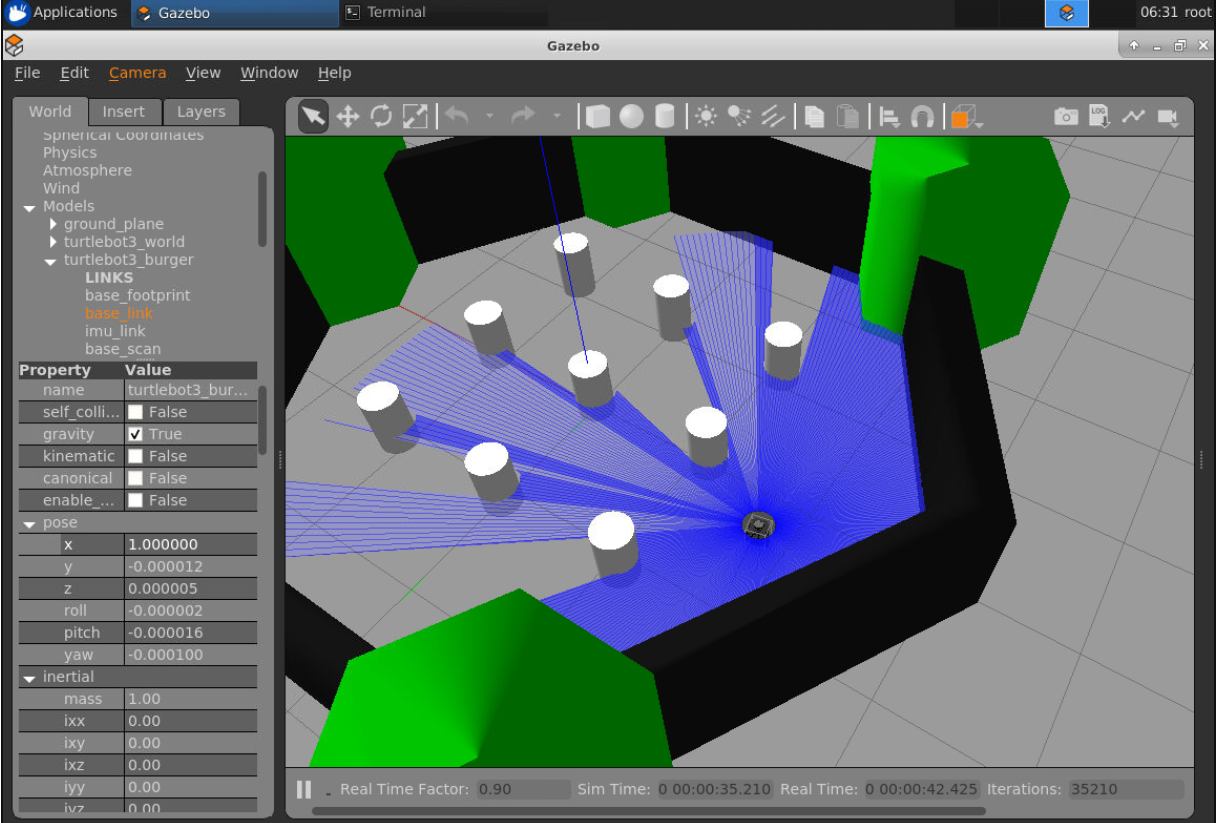 由简单对象组成的地图,可以看到小车的视野,修改参数使小车移动
由简单对象组成的地图,可以看到小车的视野,修改参数使小车移动
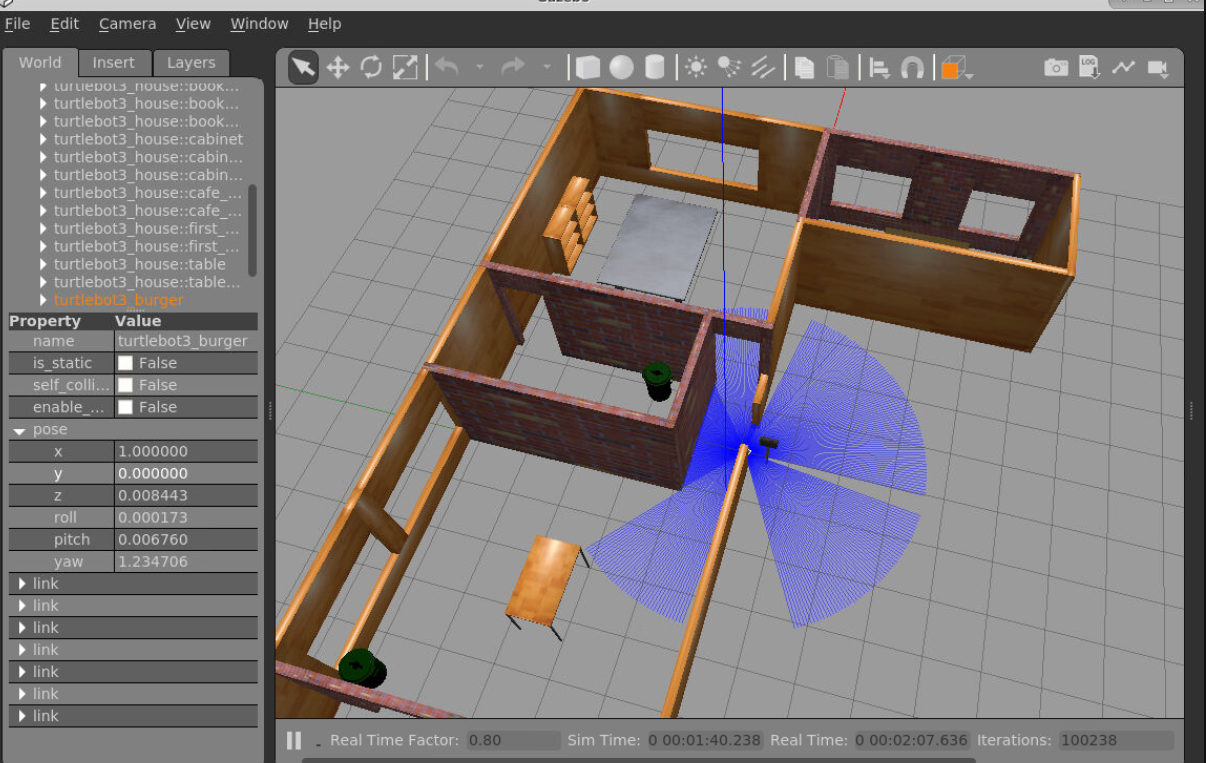
TurtleBot3 House
Rviz可视化
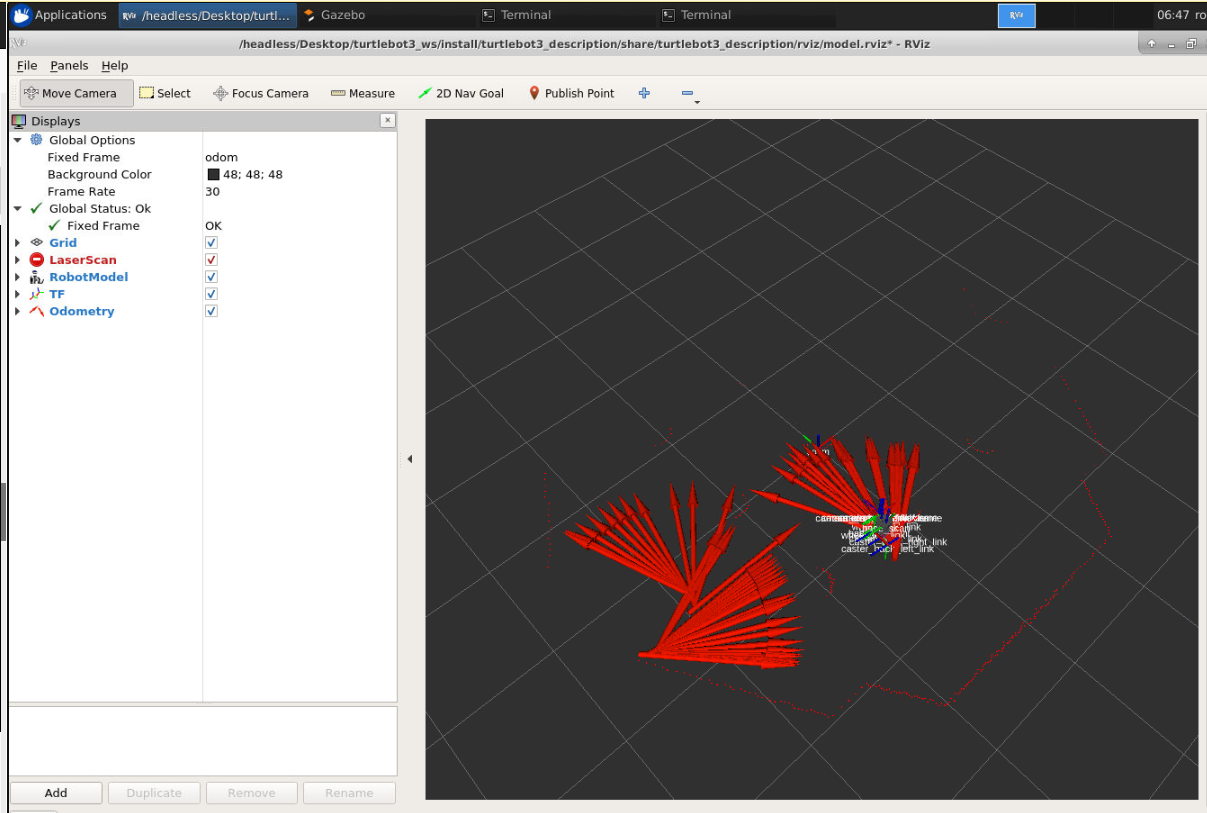 针对TurtleBot3 world
针对TurtleBot3 world
带有TurtleBot3的虚拟SLAM
rviz
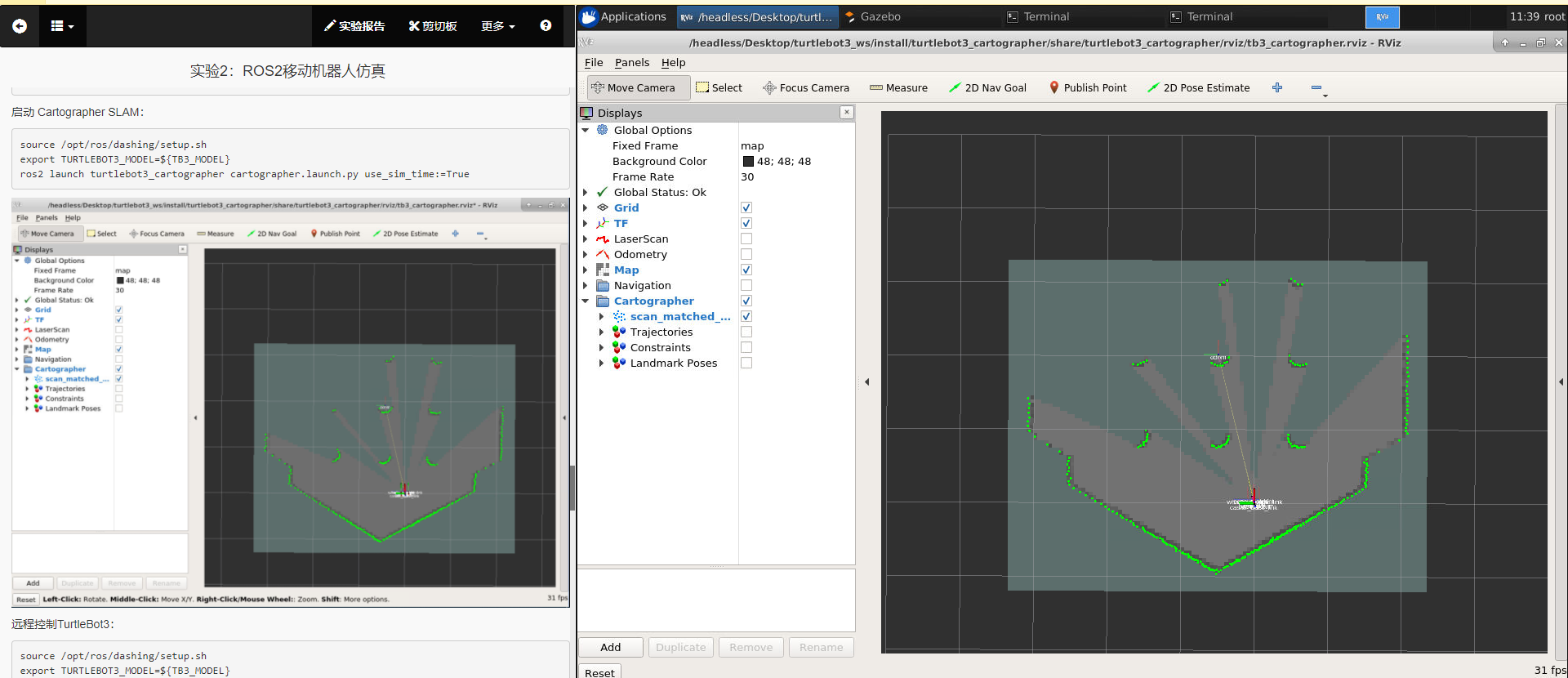
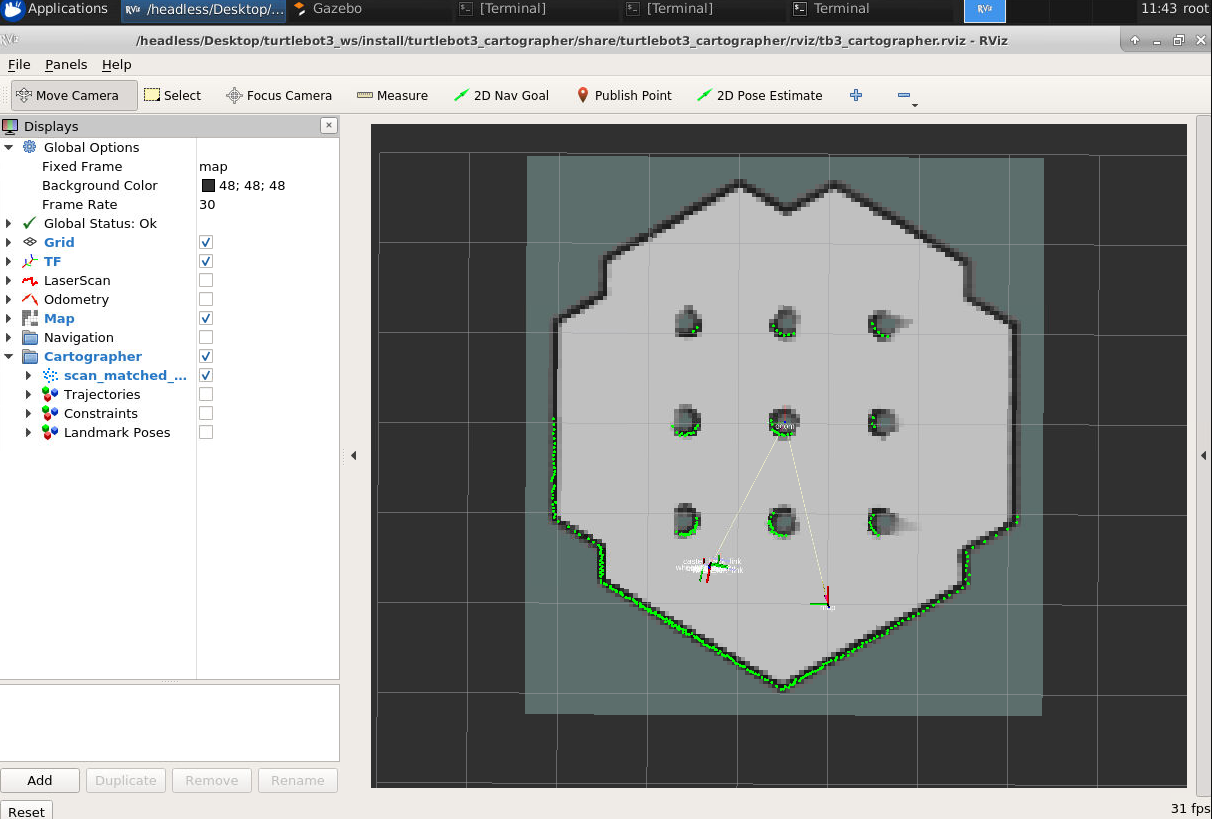
Cartographer SLAM
实验三:ROS2移动机器人动态避障(基于强化学习)
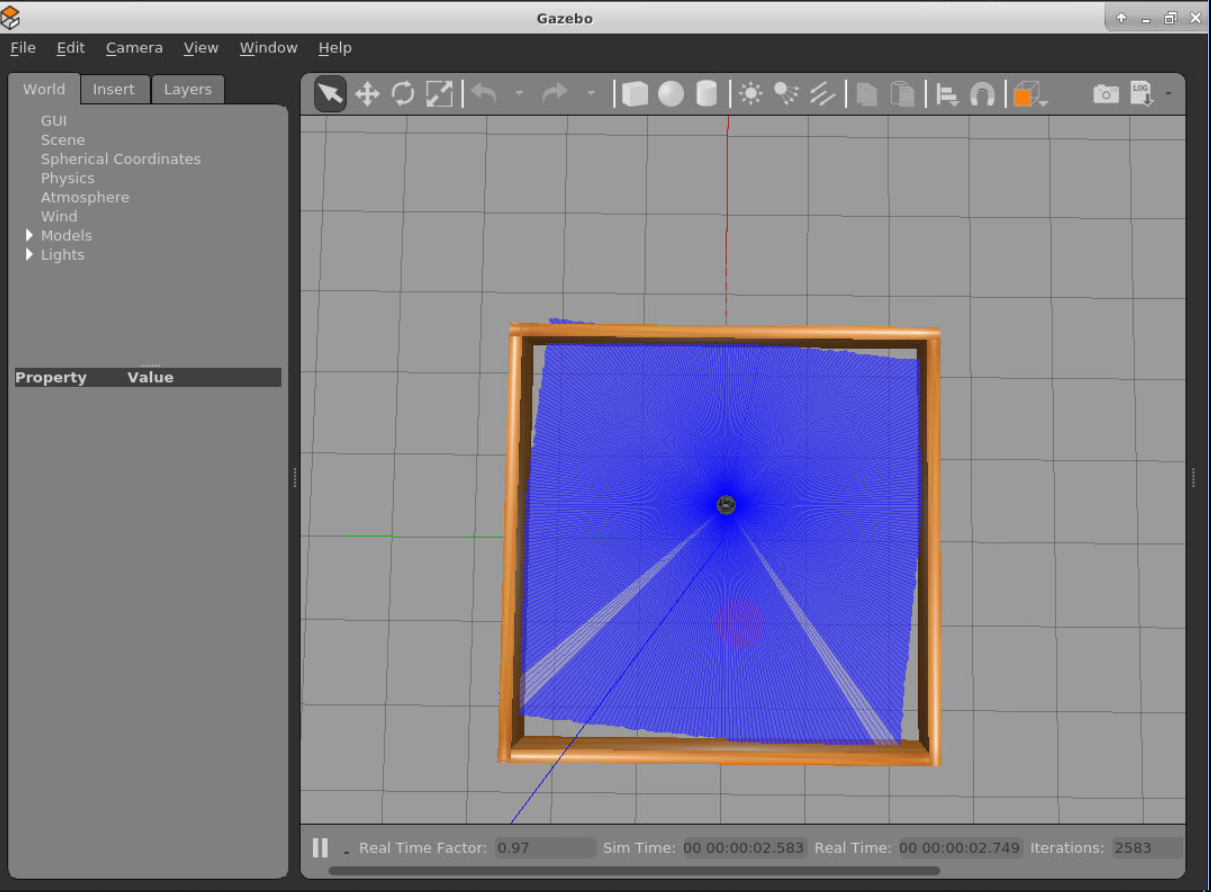
第一阶段(无障碍)
第1阶段是没有障碍的4x4地图。
提示:在执行此命令之前,您必须指定TurtleBot3的模型名称。
${TB3_MODEL}是您在burger、waffle、waffle_pi中使用的模型的名称。如果您想永久地设置export设定,请参考 Export TURTLEBOT3_MODEL 页面。
在终端中运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 launch turtlebot3_gazebo turtlebot3_dqn_stage1.launch.py
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_gazebo 1
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_environment
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_agent 1
如果要测试训练有素的模型,请使用以下命令。
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_test 1
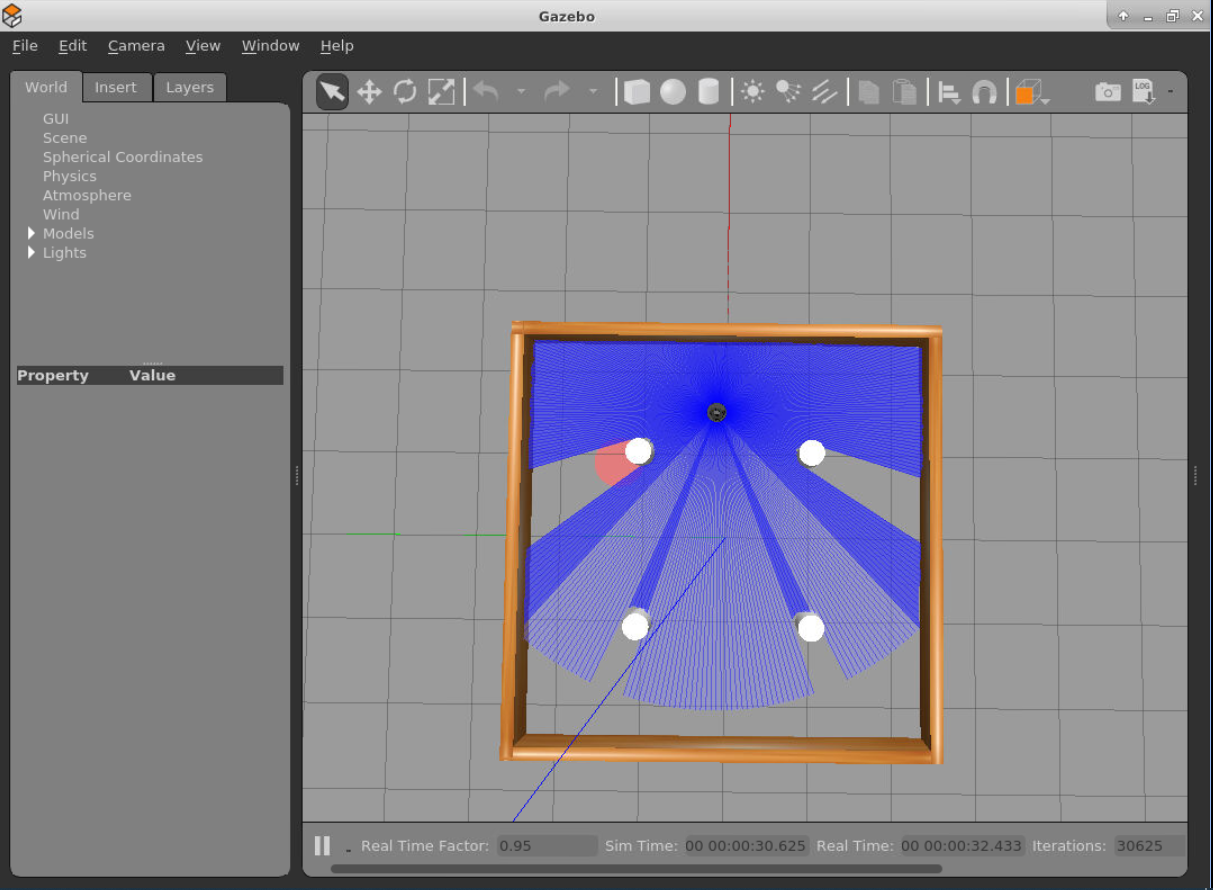
第二阶段(静态障碍)
第2阶段是一个4x4地图,其中包含四个静态圆柱体障碍物。
在终端中运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 launch turtlebot3_gazebo turtlebot3_dqn_stage2.launch.py
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_gazebo 2
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_environment
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_agent 2
如果要测试训练有素的模型,请使用以下命令。
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_test 2
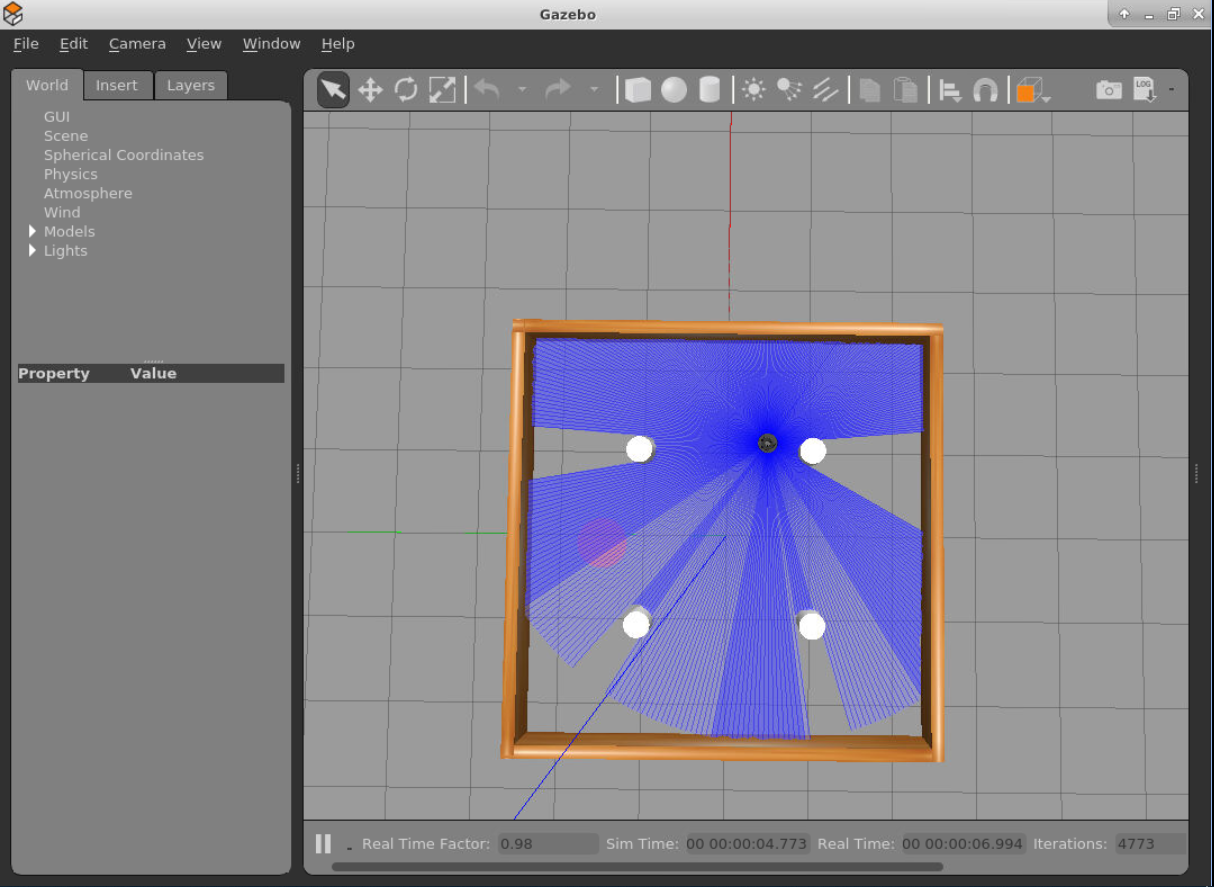
第三阶段(运动障碍)
第3阶段是一个4x4地图,其中有四个移动的圆柱体障碍物。
在终端中运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 launch turtlebot3_gazebo turtlebot3_dqn_stage3.launch.py
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_gazebo 3
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_environment
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_agent 3
如果要测试训练有素的模型,请使用以下命令。
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_test 3
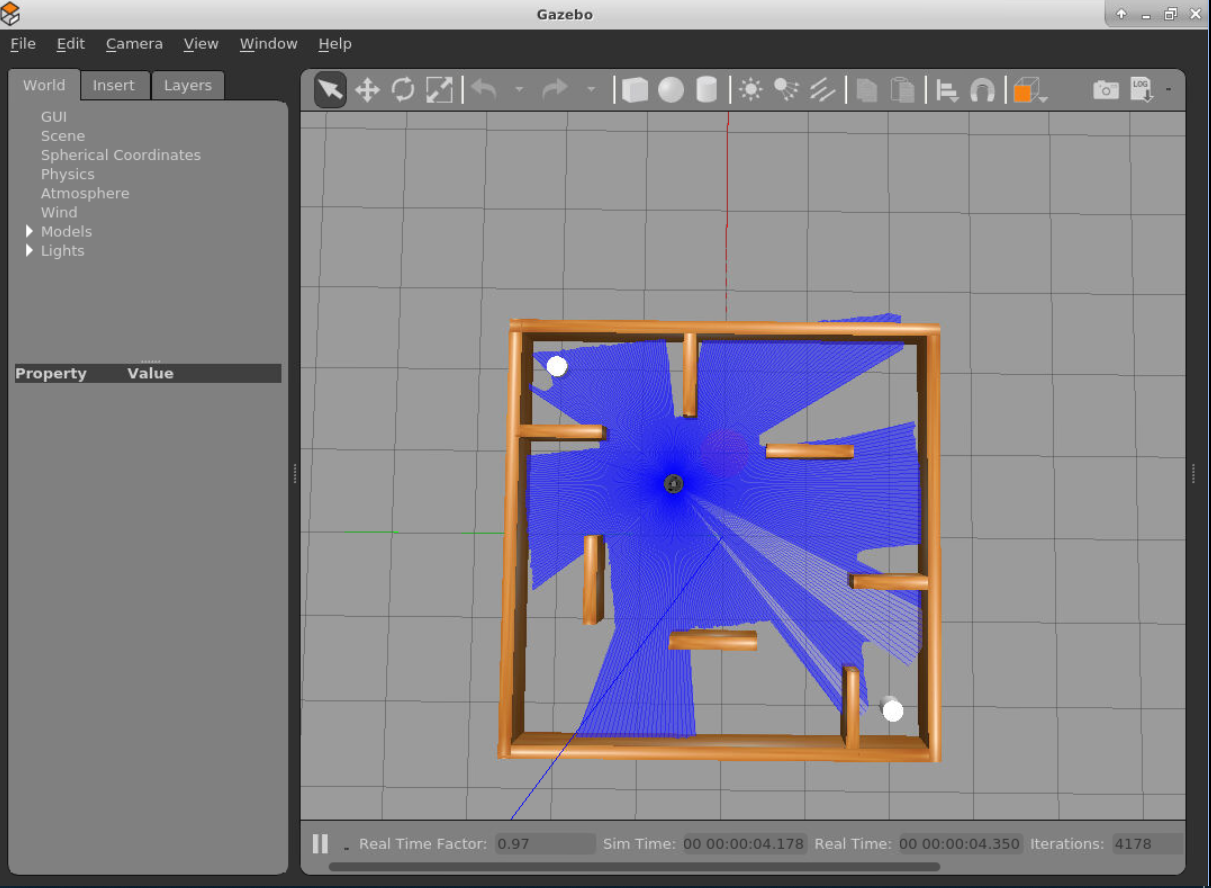
第四阶段(组合障碍)
第4阶段是一个5x5地图,其中有墙壁和两个移动的圆柱体障碍物。
在终端中运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 launch turtlebot3_gazebo turtlebot3_dqn_stage4.launch.py
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_gazebo 4
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_environment
打开另一个终端,运行:
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_agent 4
如果要测试训练有素的模型,请使用以下命令。
source /opt/ros/dashing/setup.sh
export TURTLEBOT3_MODEL=${TB3_MODEL}
ros2 run turtlebot3_dqn dqn_test 4
This line appears after every note.