实验3:自动驾驶实战
实验1:实时定位车道
注释图像
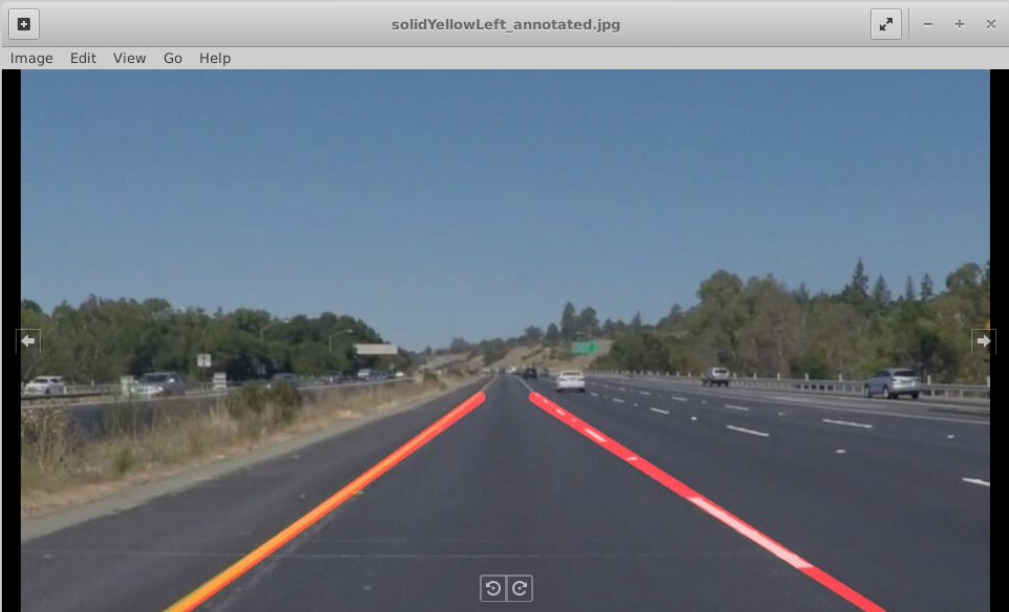
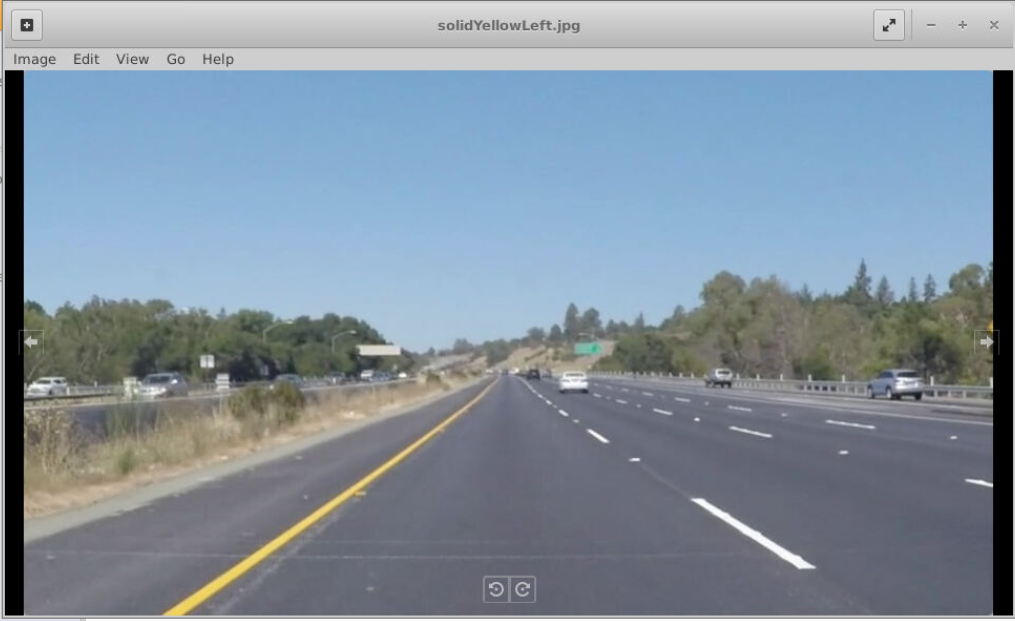
注释流程
- 调整成灰度值的图像
- 应用高斯平滑,去除噪声
- 使用canny边缘检测,将物体的边缘检测出来
- 重点关注前方部分梯形区域,遮掩边缘
- 运行Hough检测,将边缘图像中的直线检测出来
- 其中选出斜率大于0.5的直线,因为正常的视野里道路直线斜率高于这个阈值
- 通过将道路图像和原始图像设置权重融合,在初始图像上画出图像。
注释视频

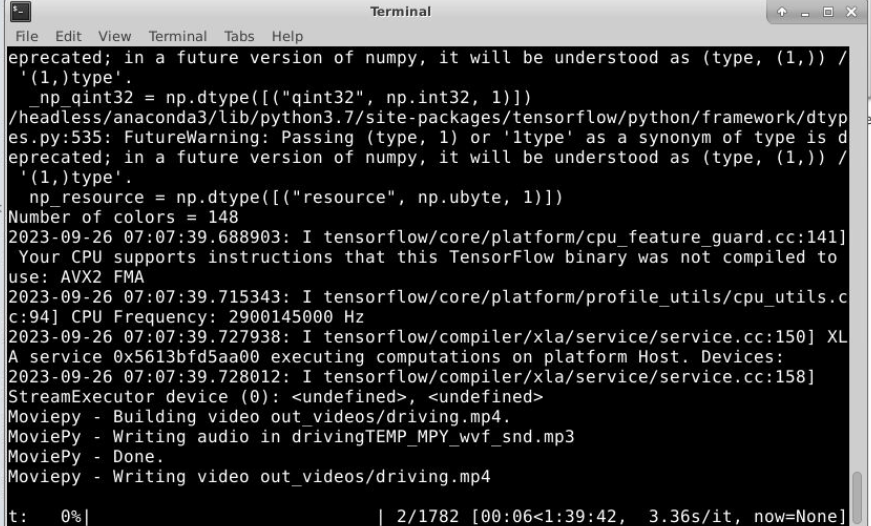
实验2:实时车辆目标检测
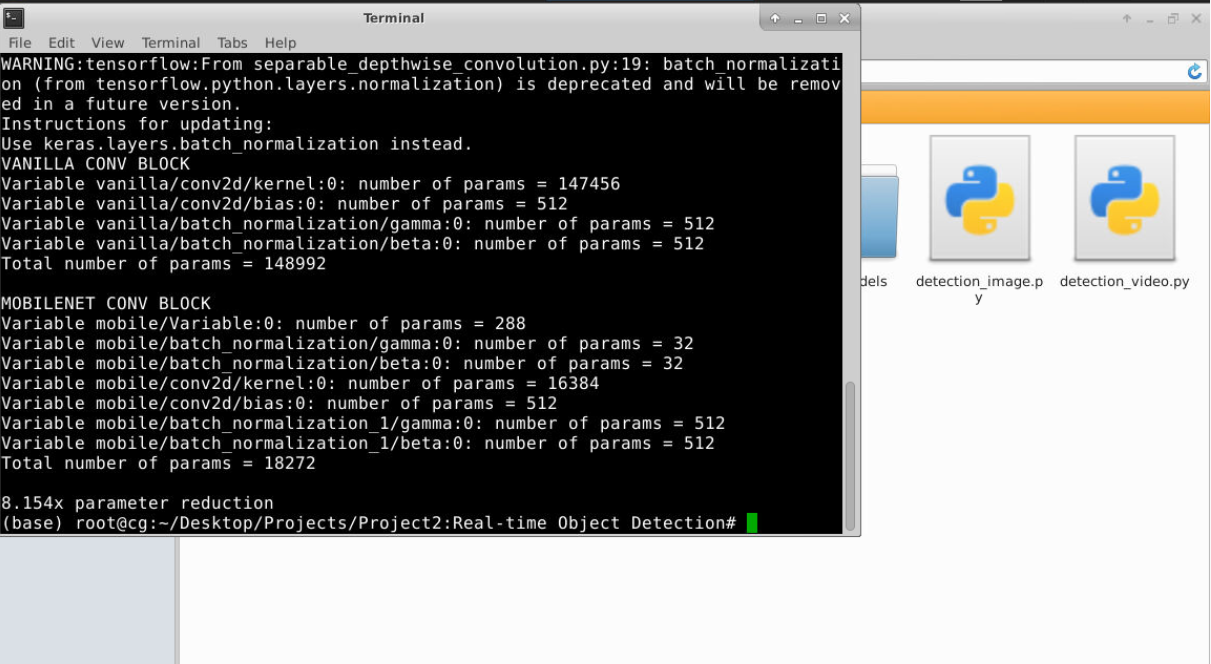
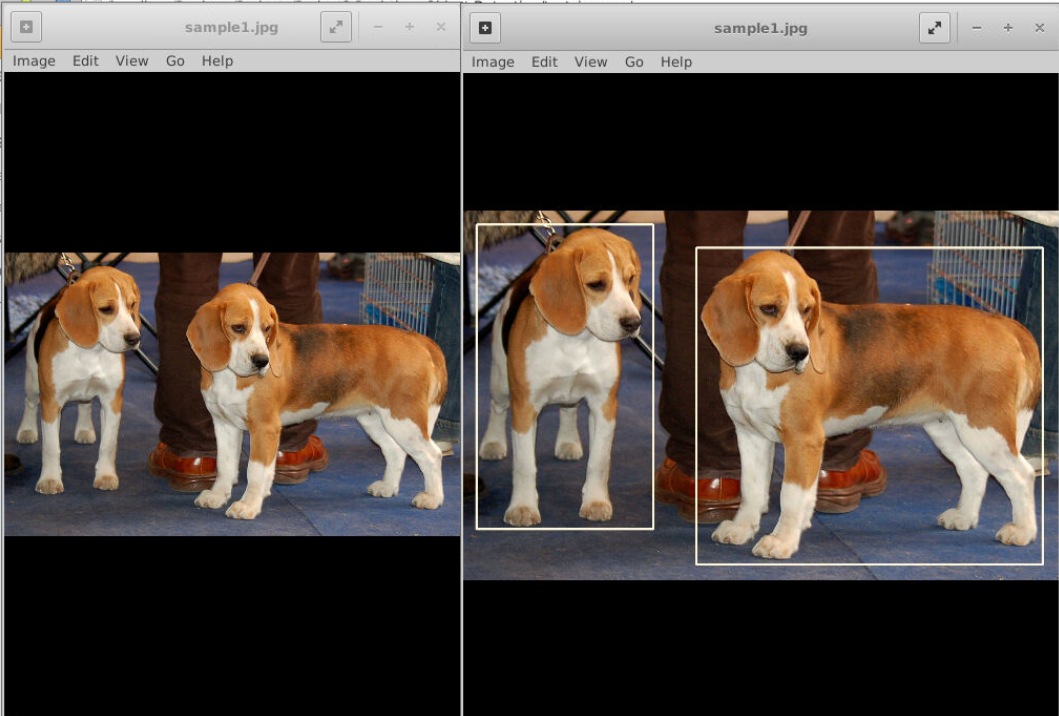
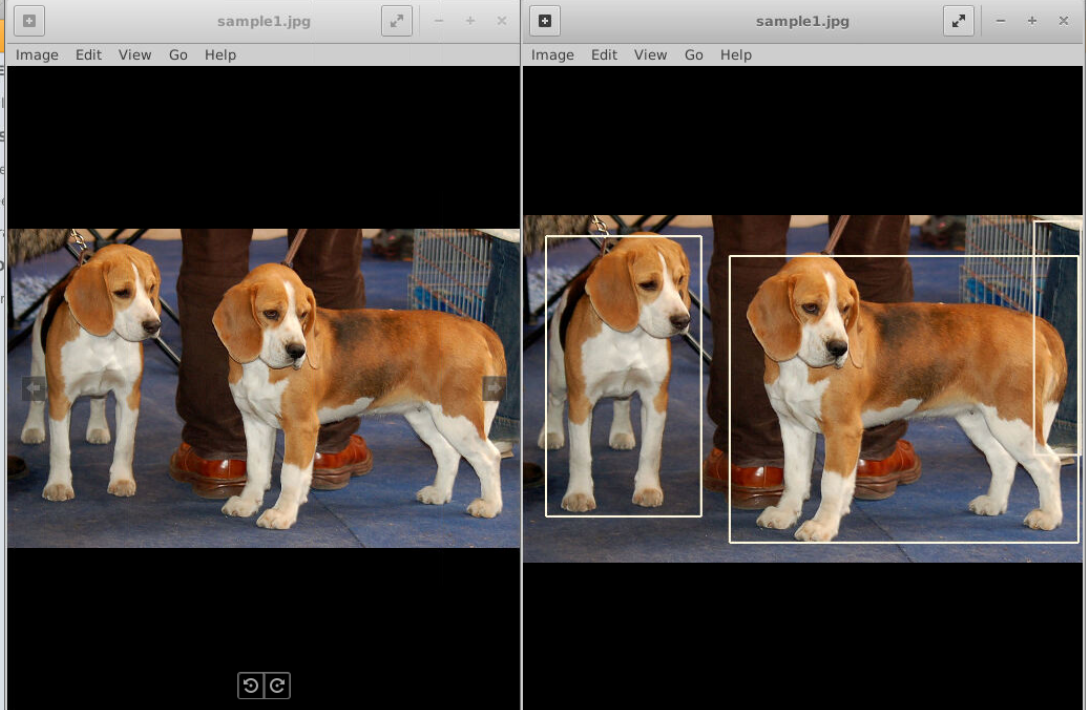
识别图片中的物体(画出检测框)
-
SSD
-
RFCN
-
FASTER-RCNN
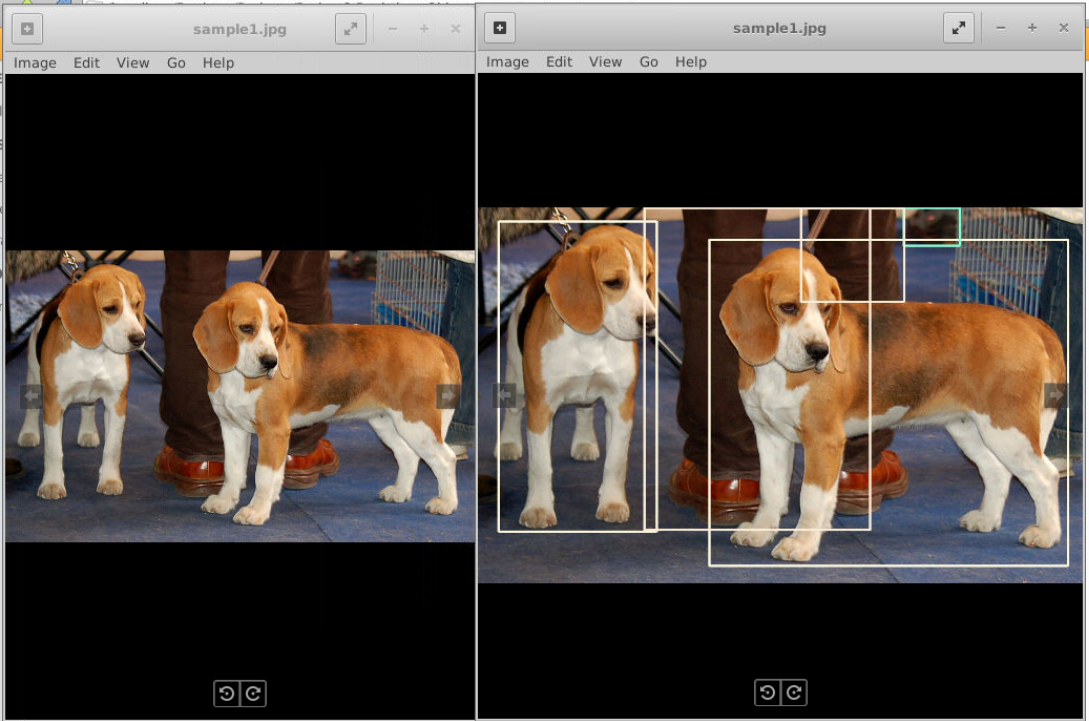
SSD最快,表现也相对较好。而FASTER-CNN识别范围更广。
在相同的视频上,SSD用时1min20s,识别效果一般
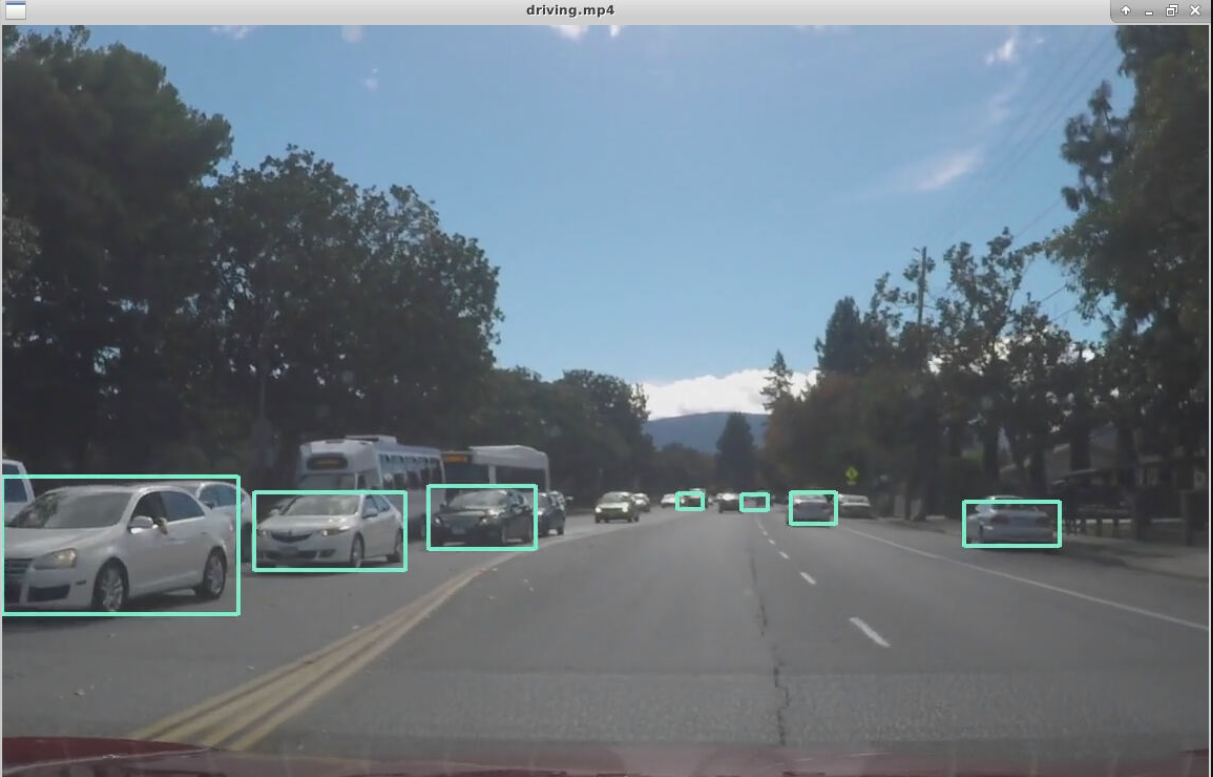
FASTER-RCNN 接近两个小时
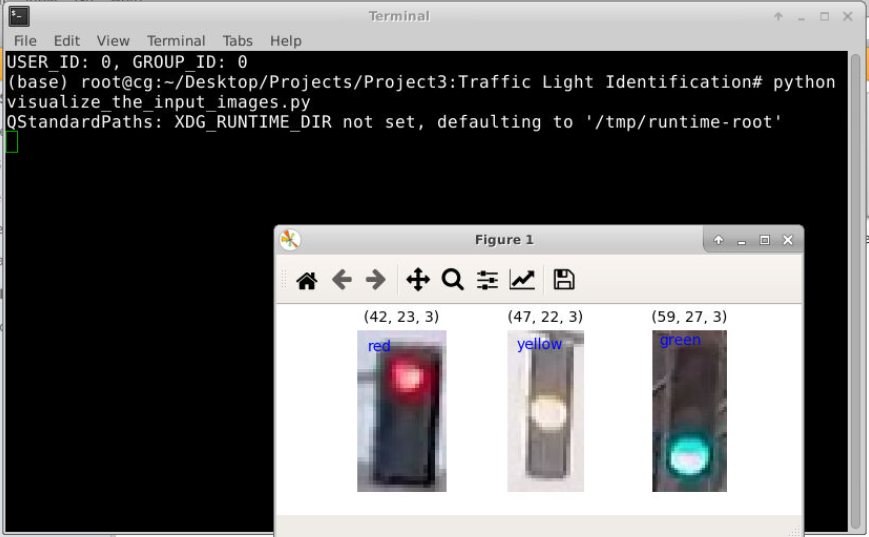
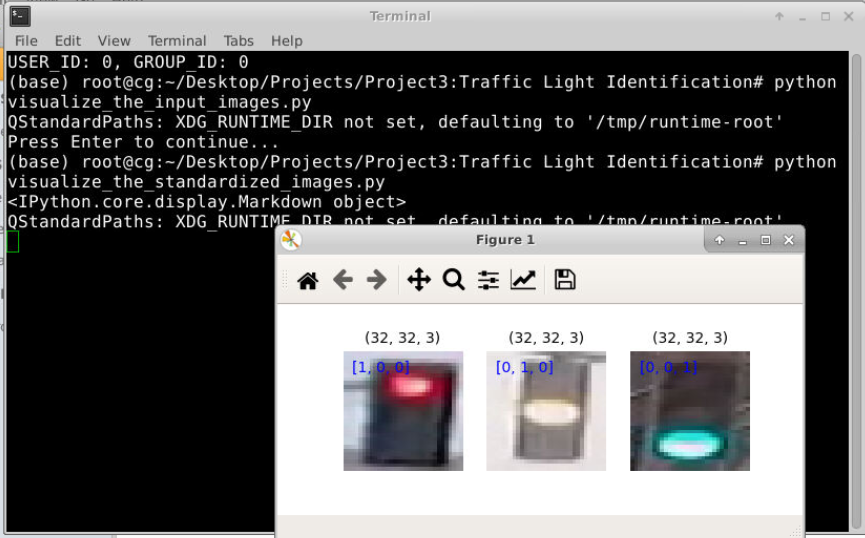
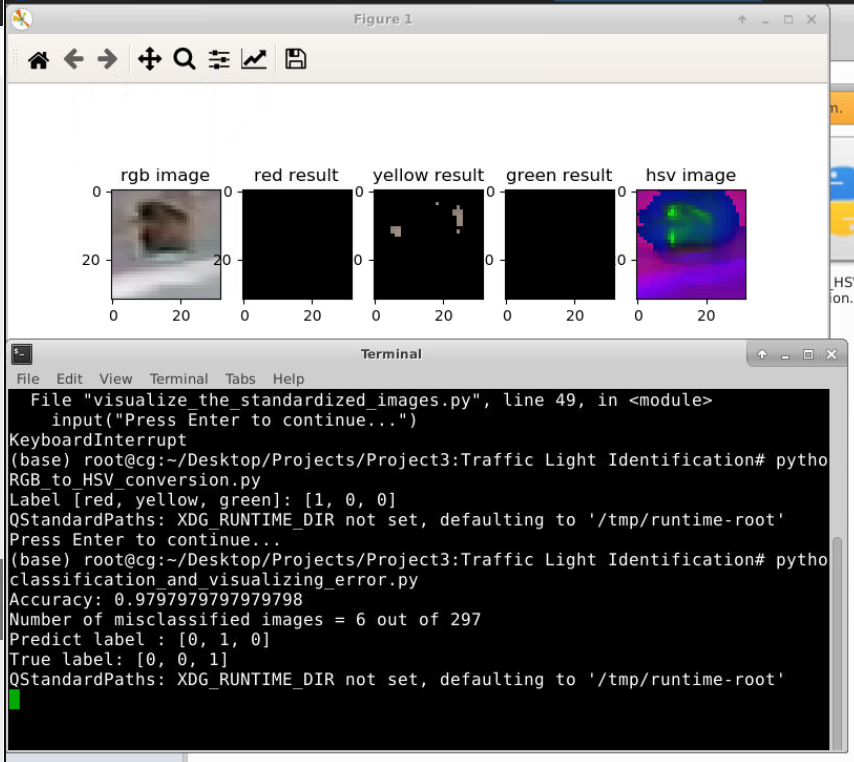
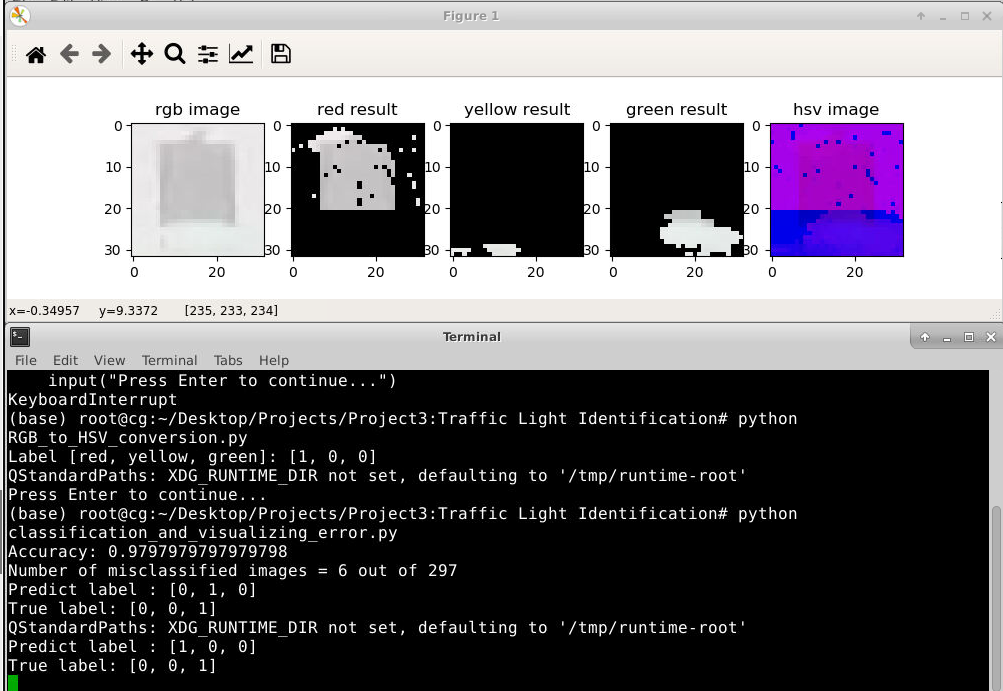
实验3:交通灯识别
可视化数据
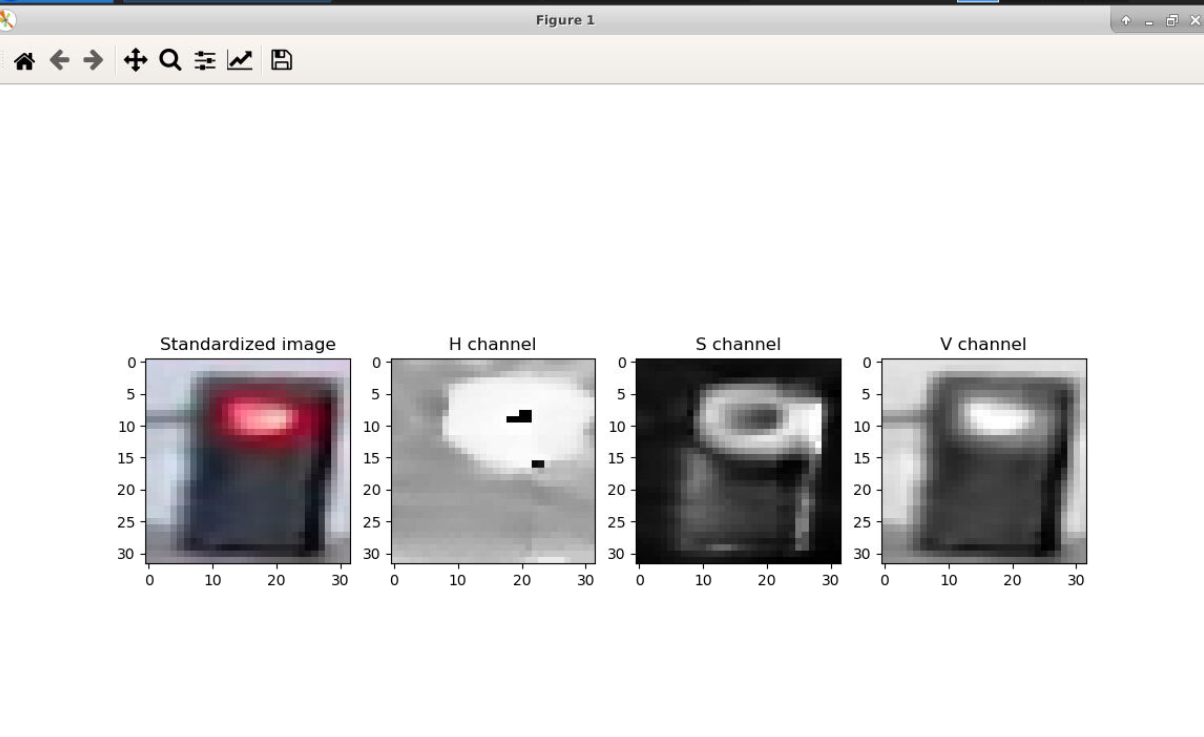
标准化数据
HSV颜色空间转换
HSV(Hue, Saturation, Value)颜色空间
-
色调(Hue):色调表示颜色的类型或种类,通常以角度表示(0°到360°)。在HSV颜色空间中,不同的色调值对应不同的颜色,例如,红色对应0°,绿色对应120°,蓝色对应240°,而黄色则在中间。
-
饱和度(Saturation):饱和度表示颜色的鲜艳程度或纯度。饱和度为0时,颜色是灰色的,而饱和度为最大值(通常是1)时,颜色是最鲜艳的。饱和度介于0和1之间。
-
亮度(Value):亮度表示颜色的明亮程度。较高的值表示颜色较亮,较低的值表示颜色较暗。亮度范围通常是0到1。
训练分类器进行预测
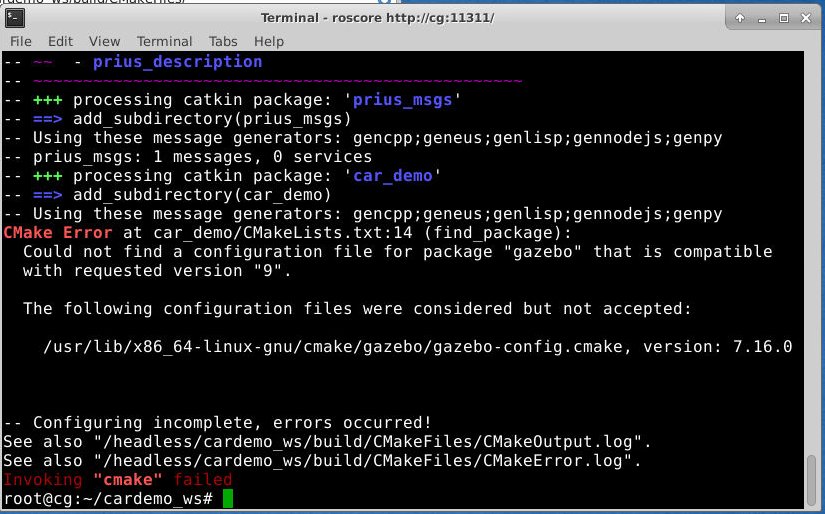
实验5:基于ROS与Gazebo的无人驾驶仿真环境
编译遇到问题
显示需要gazebo的版本到9
-
卸载旧版本(如果已安装):
sudo apt-get remove libgazebo* ros-kinetic-gazebo* gazebo* - 安装Gazebo 9: ` sudo apt-get install ros-kinetic-gazebo9-*`
-
验证安装:
gazebo --version
rviz界面
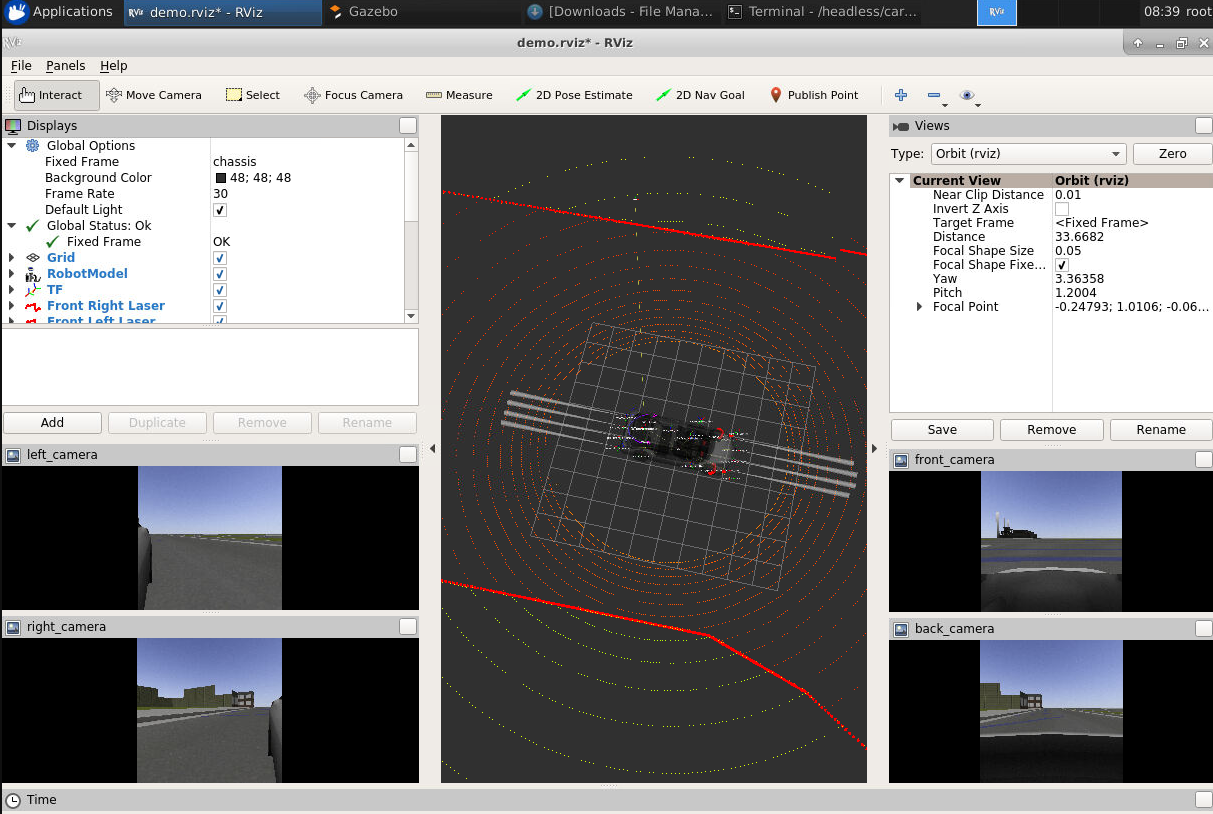
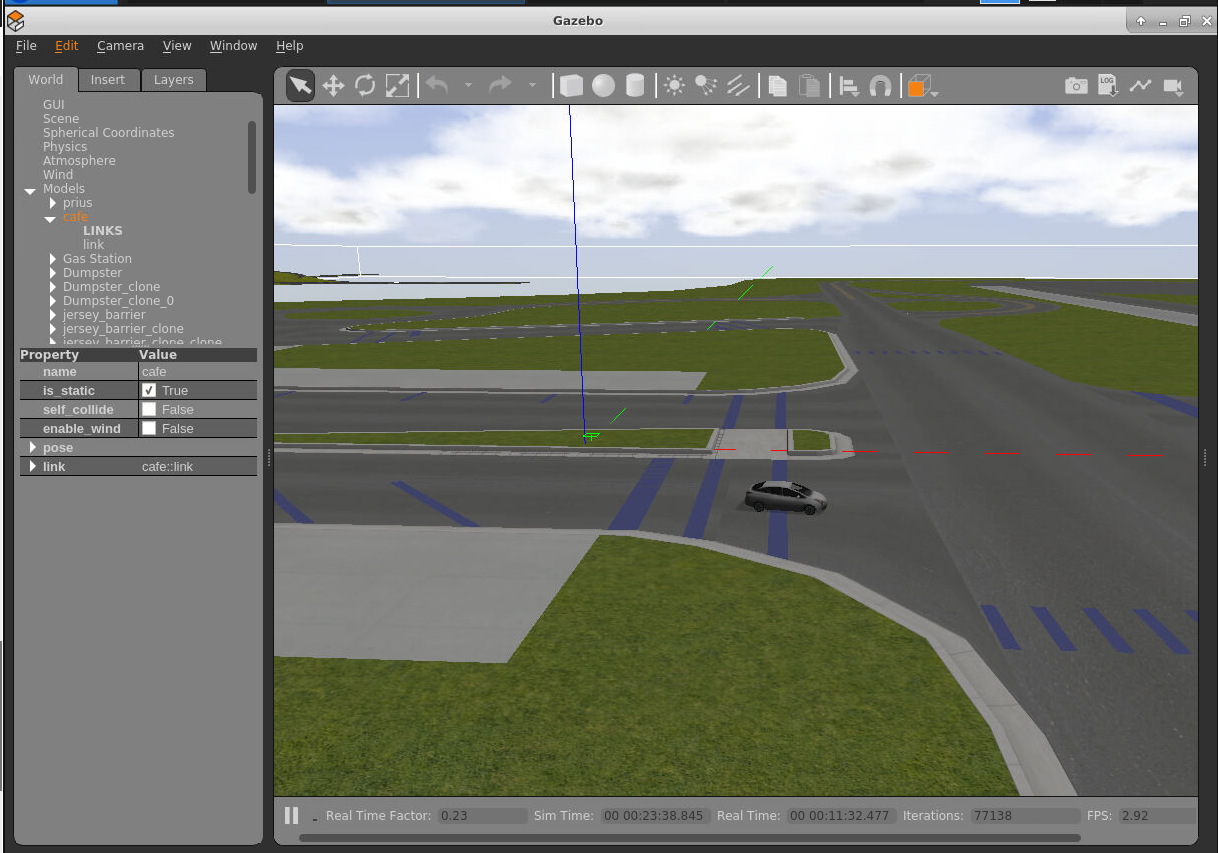
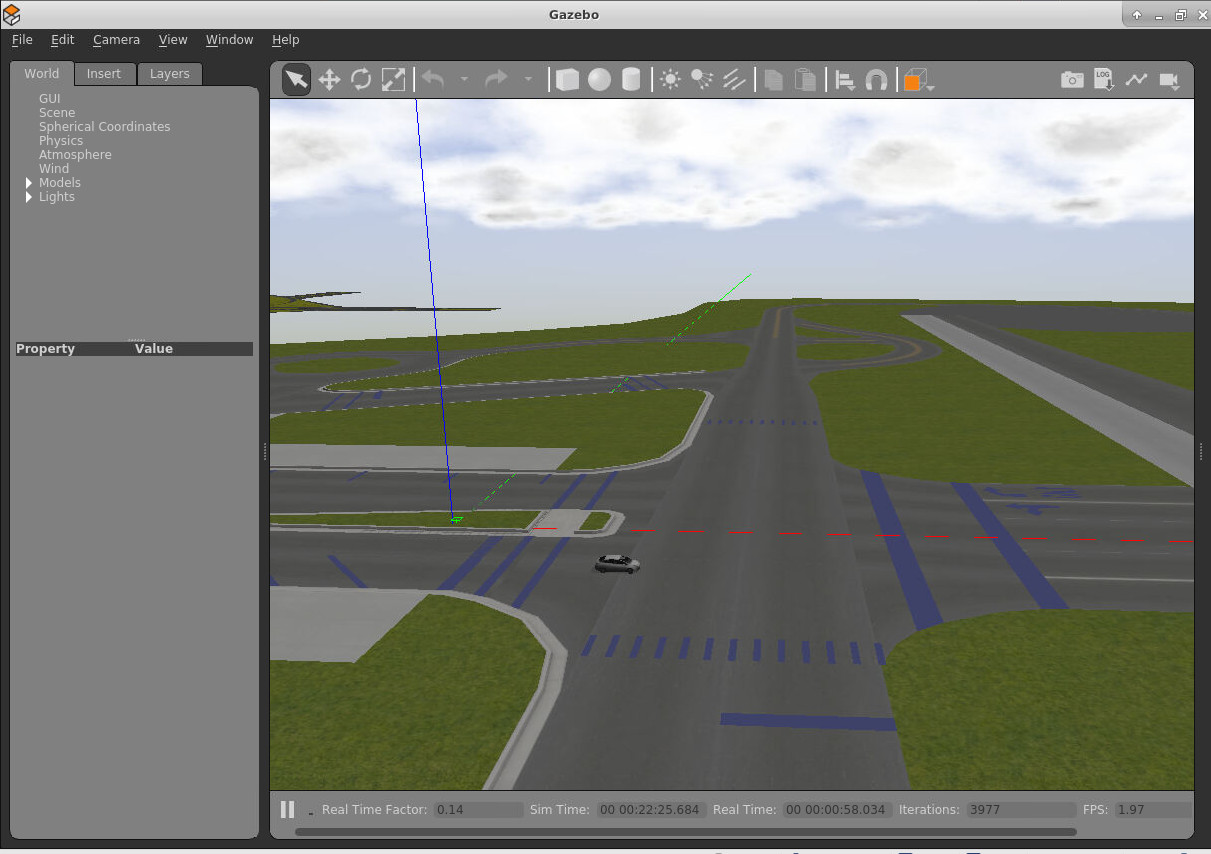
gazebo界面
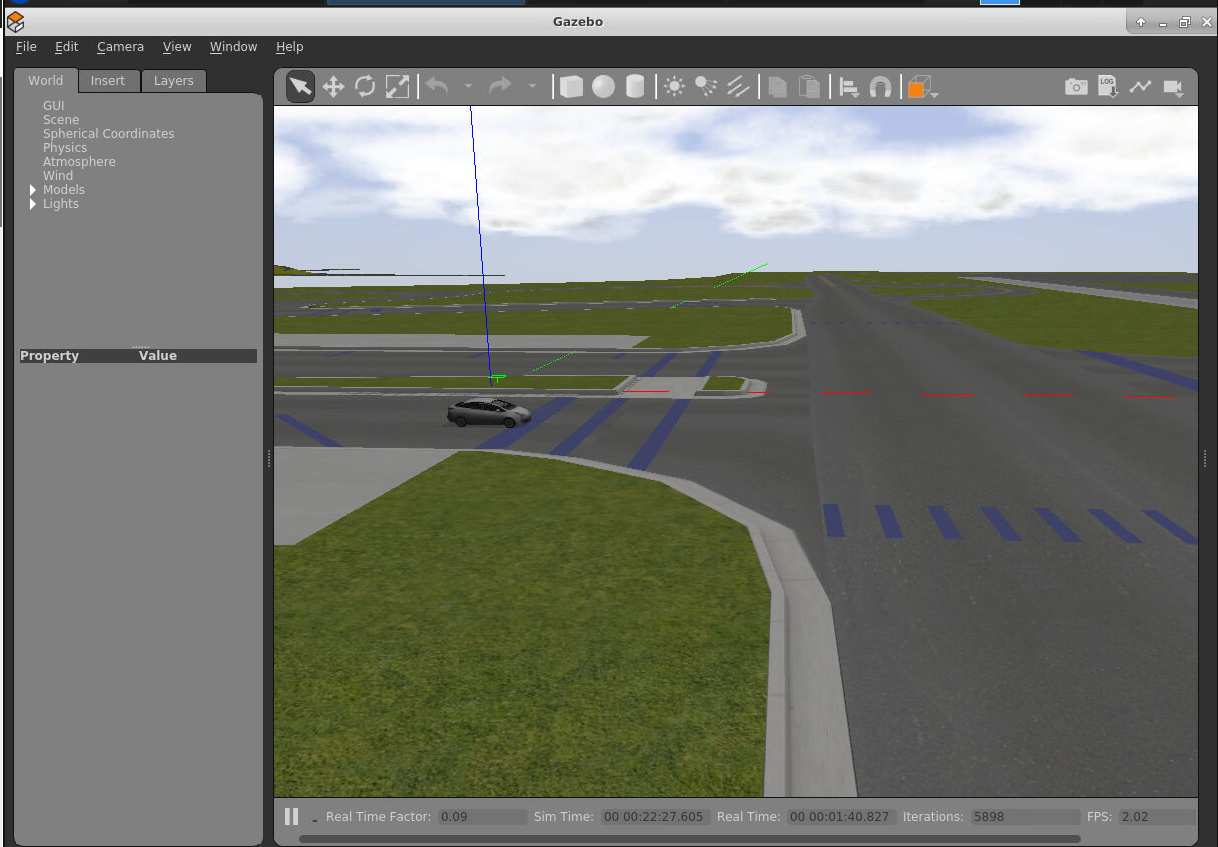
小车自己动
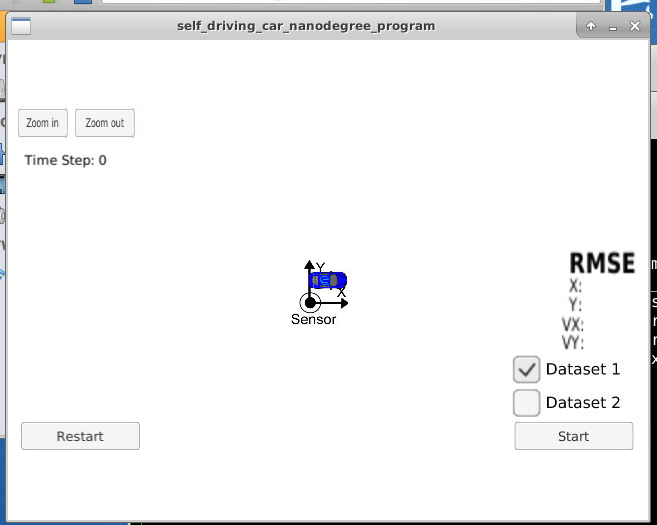
实验6: Udacity自动驾驶环境介绍
仿真环境配置
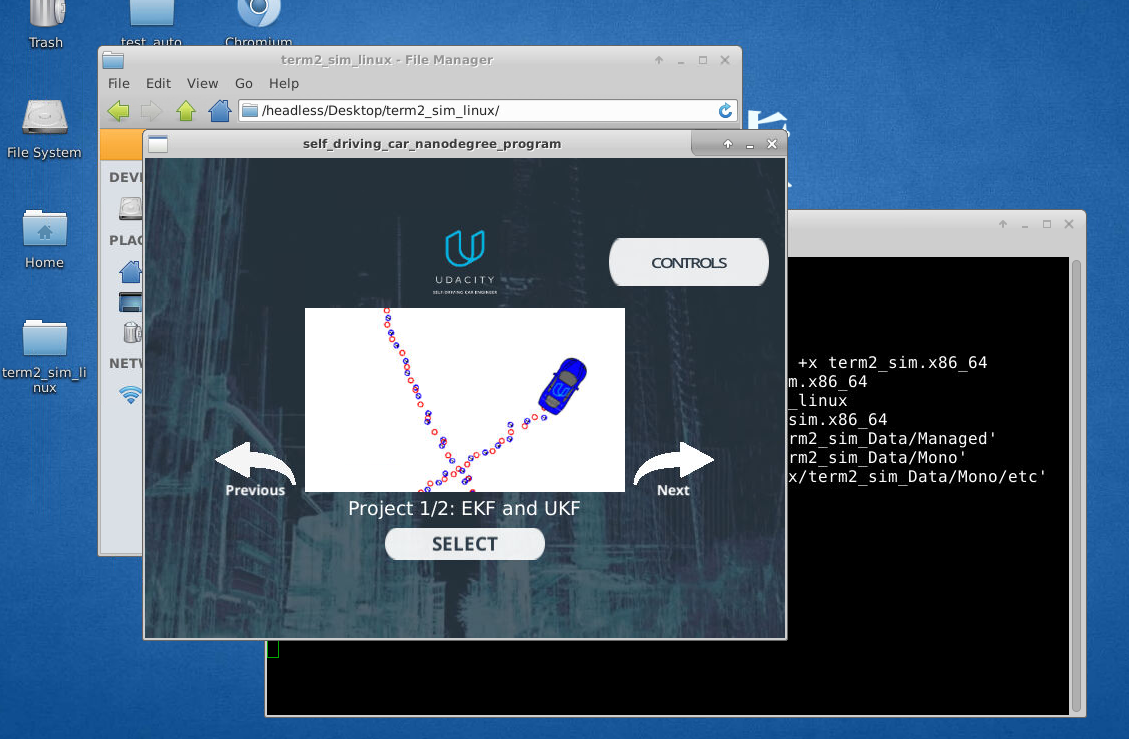
实现对小车运行环境的模拟
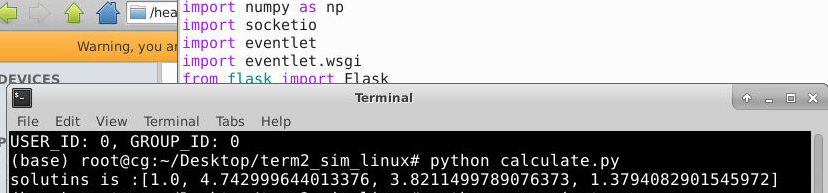
实验7:Udactiy轨迹跟踪
pyomo求解
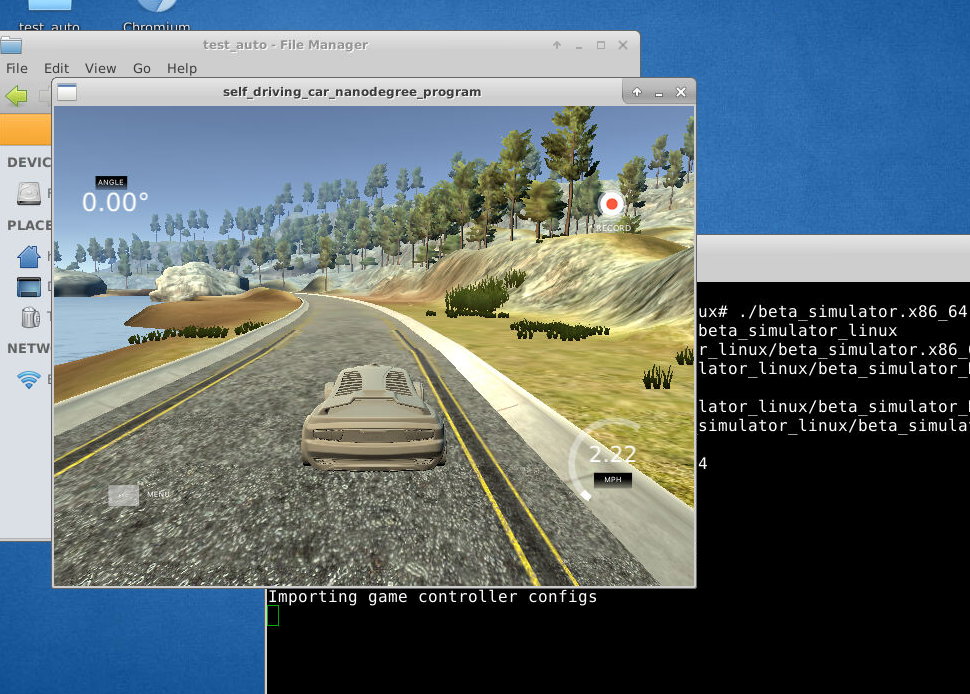
实验8: Udacity端到端自动驾驶实战
training model
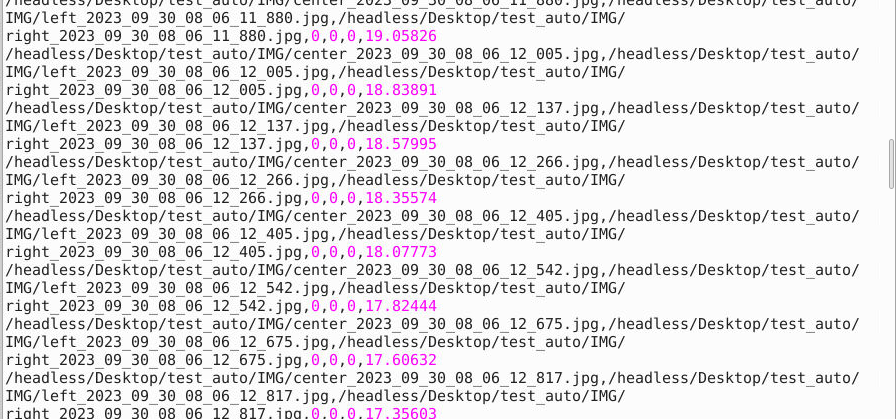
录制运动轨迹用于训练模型
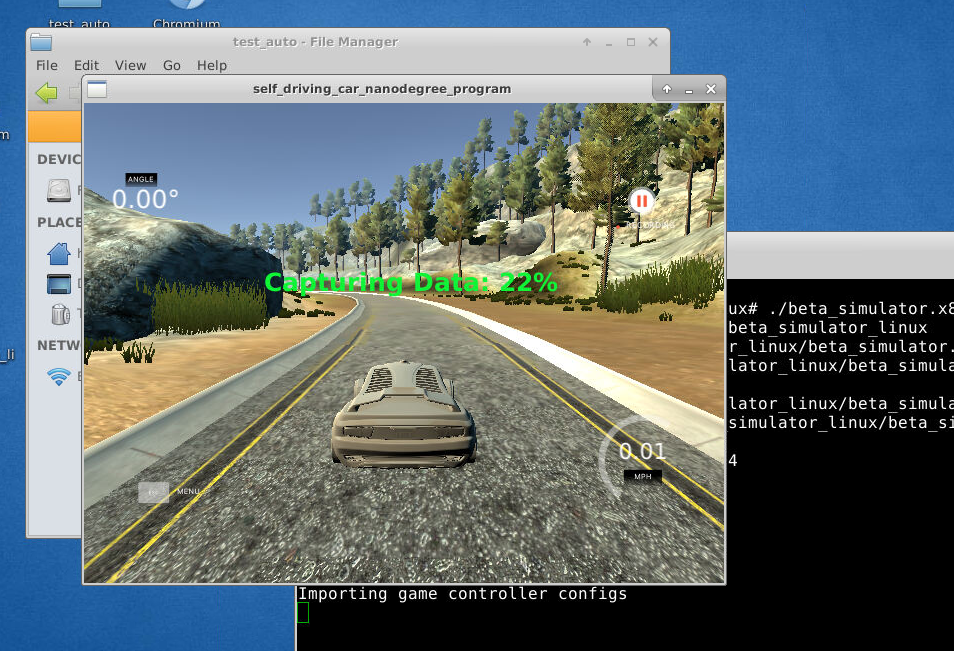
录制的新数据(观察日期)
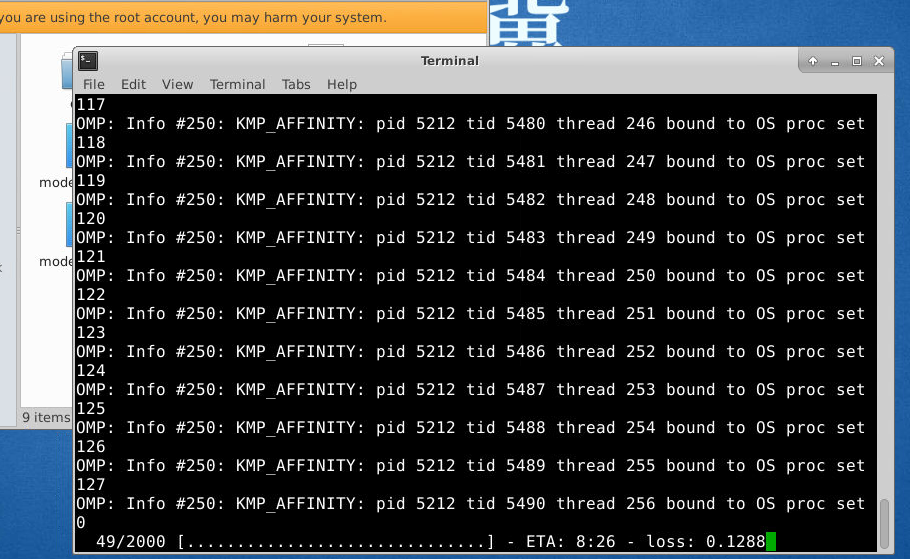
训练模型
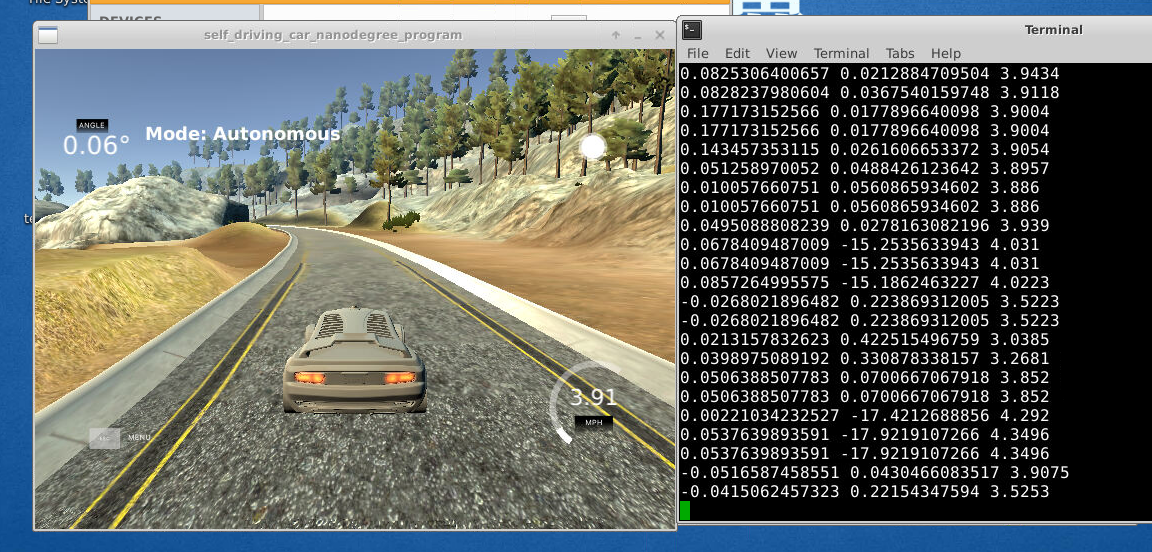
汽车自动驾驶
This line appears after every note.