实验1:ros入门
本教程中我们将会用到ros-tutorials程序包,请先在命令行输入以下命令进行安装:
sudo apt-get install ros-kinetic-ros-tutorials
rospack
rosed
使用指令
$ rosed roscpp Logger.msg
使用 rqt_console 和 roslaunch
安装rqt 和 turtlesim这两个程序包
$ sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-plugins ros-kinetic-turtlesim
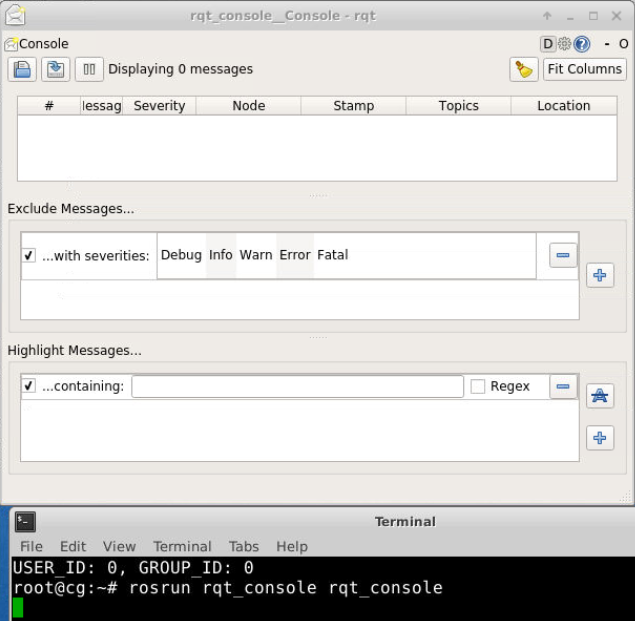
使用rqt_console和rqt_logger_level
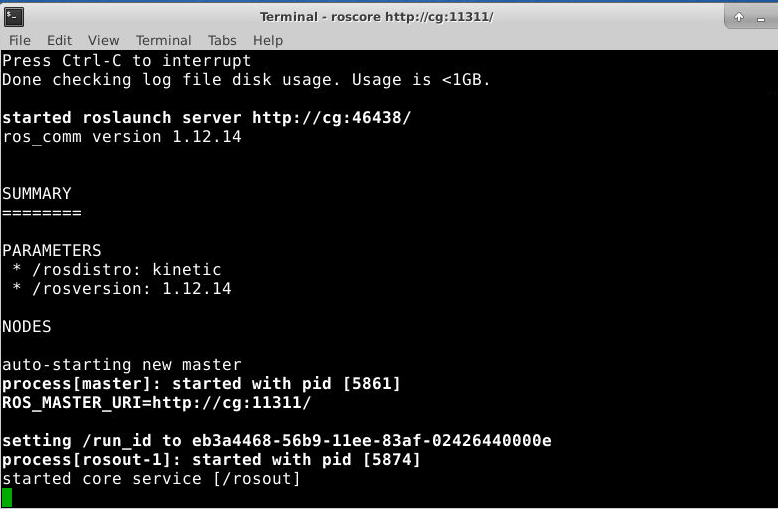
roscore
rqt
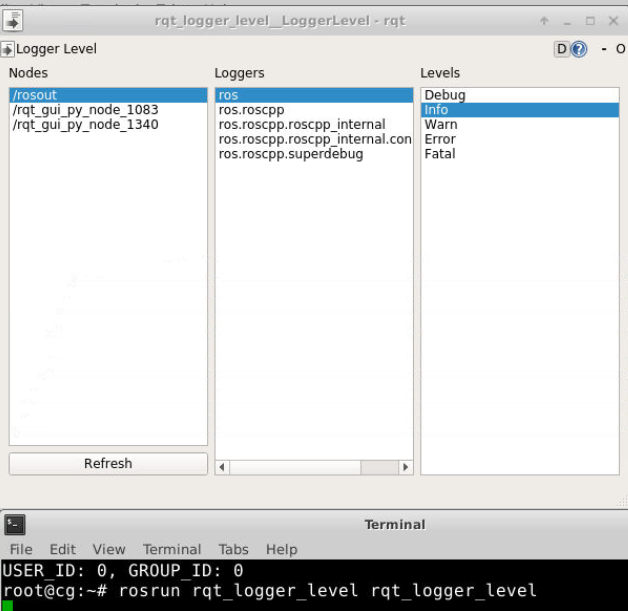
rqt_logger_level
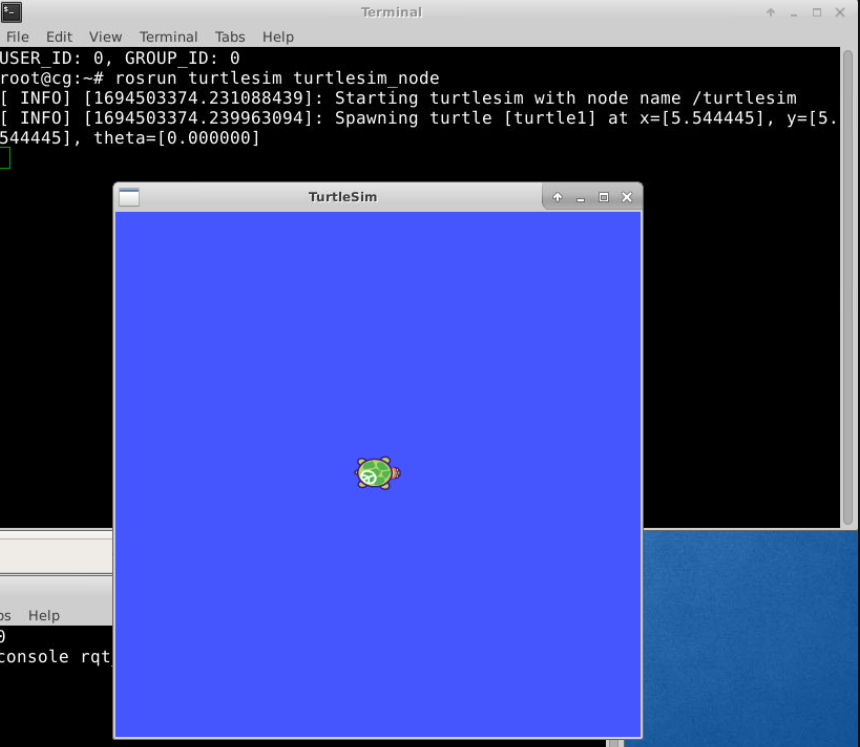
turtlesim
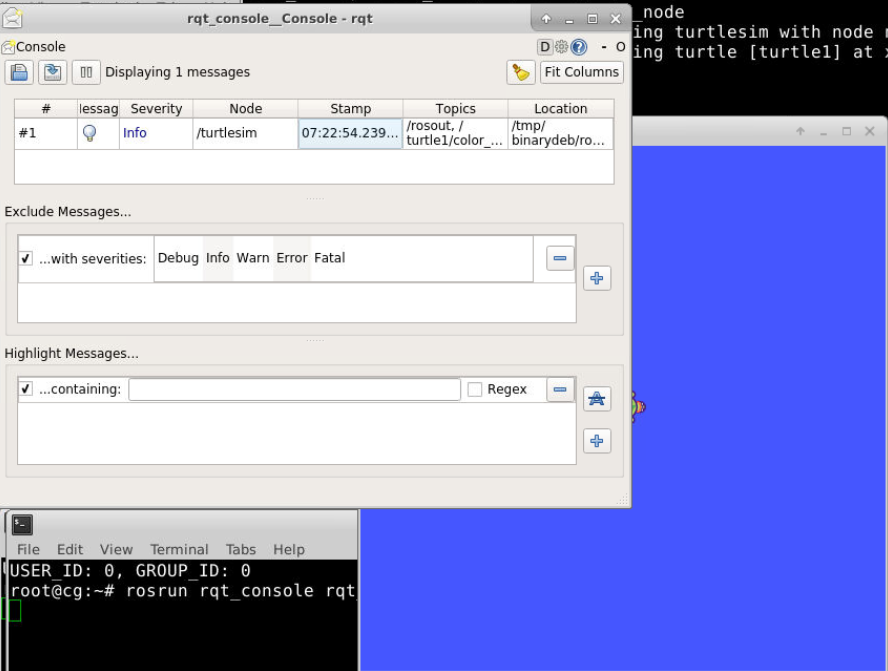
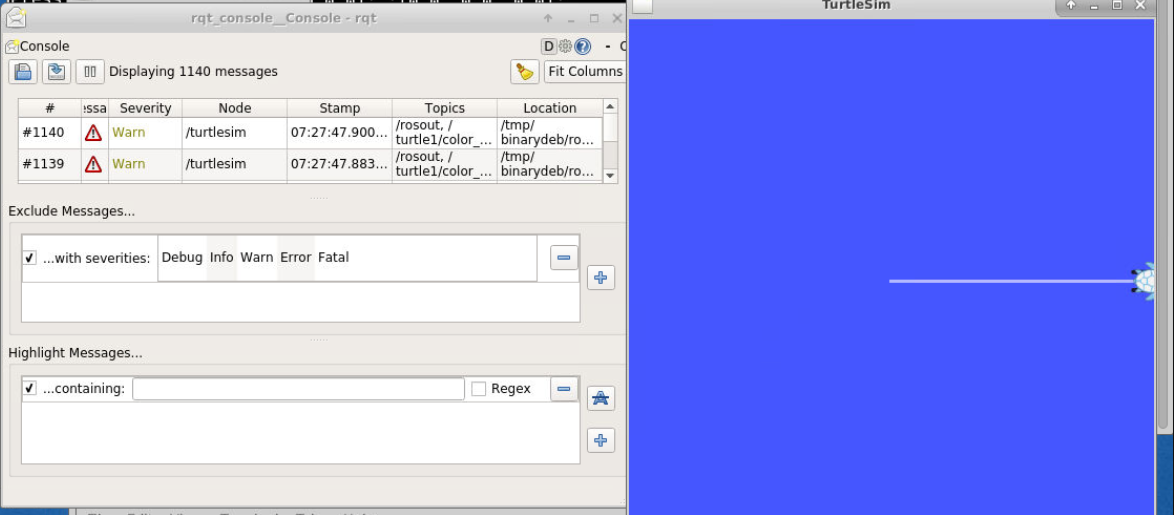
在rqt_console可以看到turtlesim节点的输出信息
将等级修改为warn后,在新终端运行新指令
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
|  |
使用roslaunch
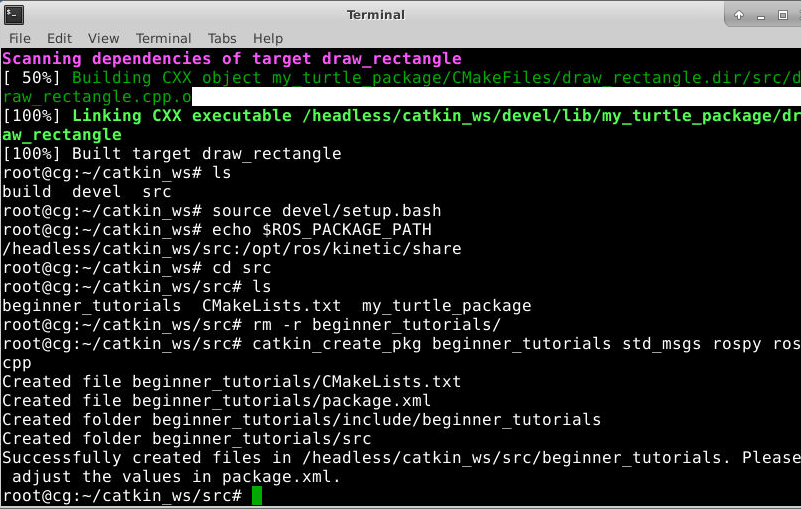
- 创建程序包
cd ~/catkin_ws/src catkin_create_pkg beginner_tutorials std_msgs rospy roscpp - cd切换到新创建的程序包下
- 再创建一个luanch文件夹
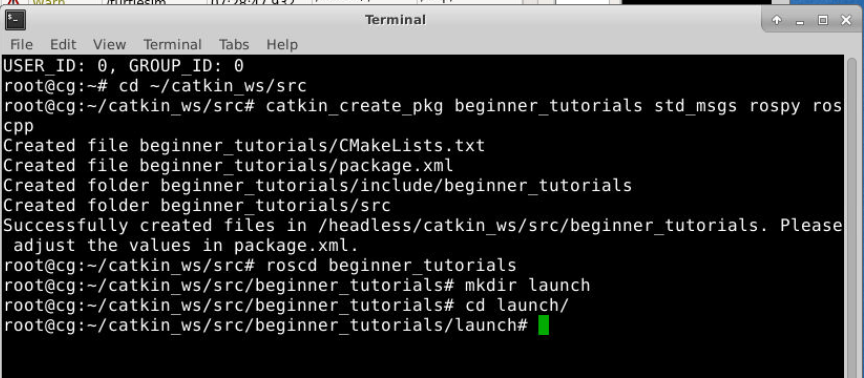
- 创建一个名为turtlemimic.launch的launch文件并复制以下内容
- ns是命名,都使用同一个包
turtlesim - 启动模仿节点,使turtlesim2模仿turtlesim1 ```xml
- ns是命名,都使用同一个包
+ 启动launch文件
```bash
$ roslaunch beginner_tutorials turtlemimic.launch
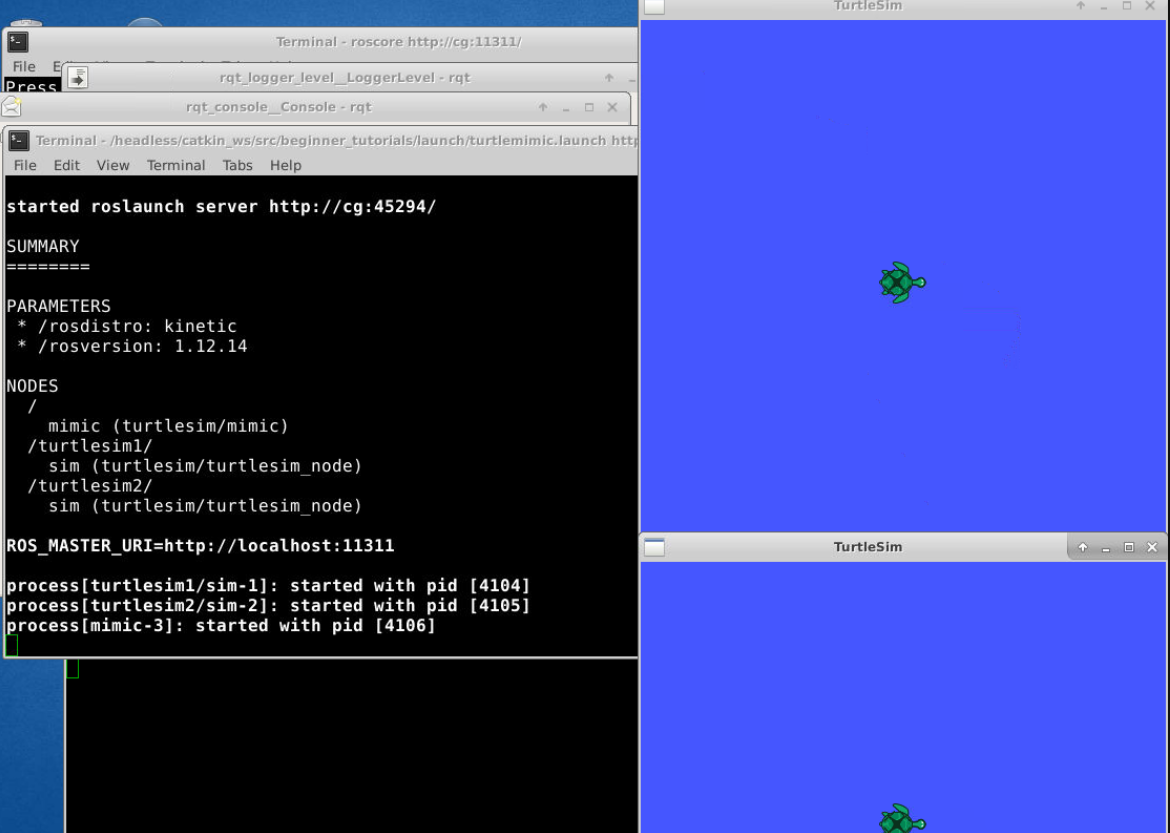
- 然后我们让turtlesim1运行,会发现turtlesim2也会运行
$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'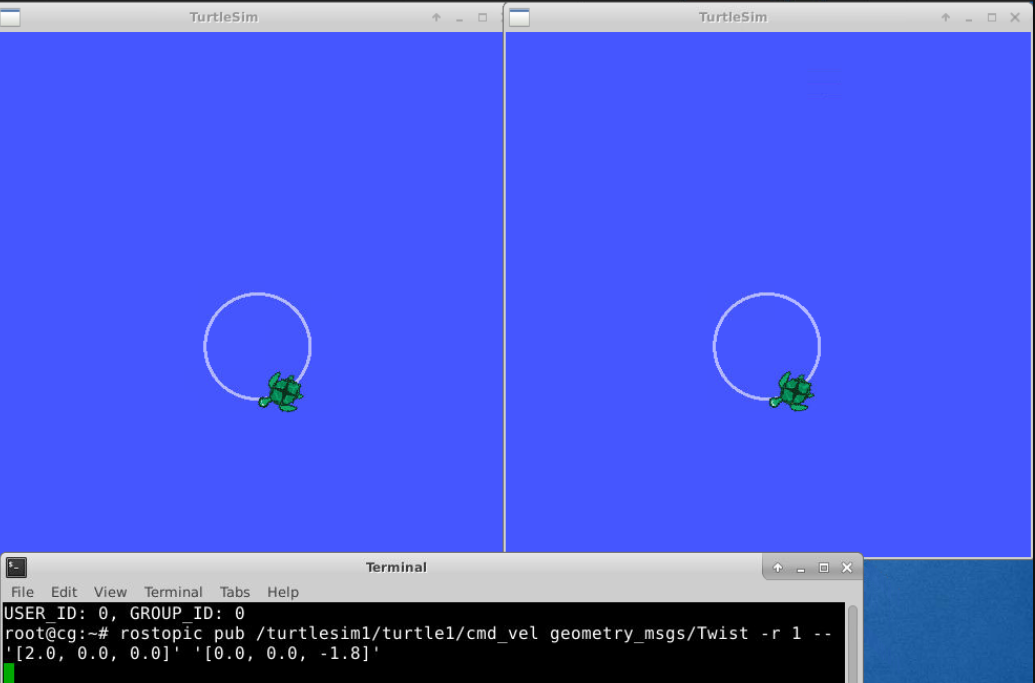
rqt
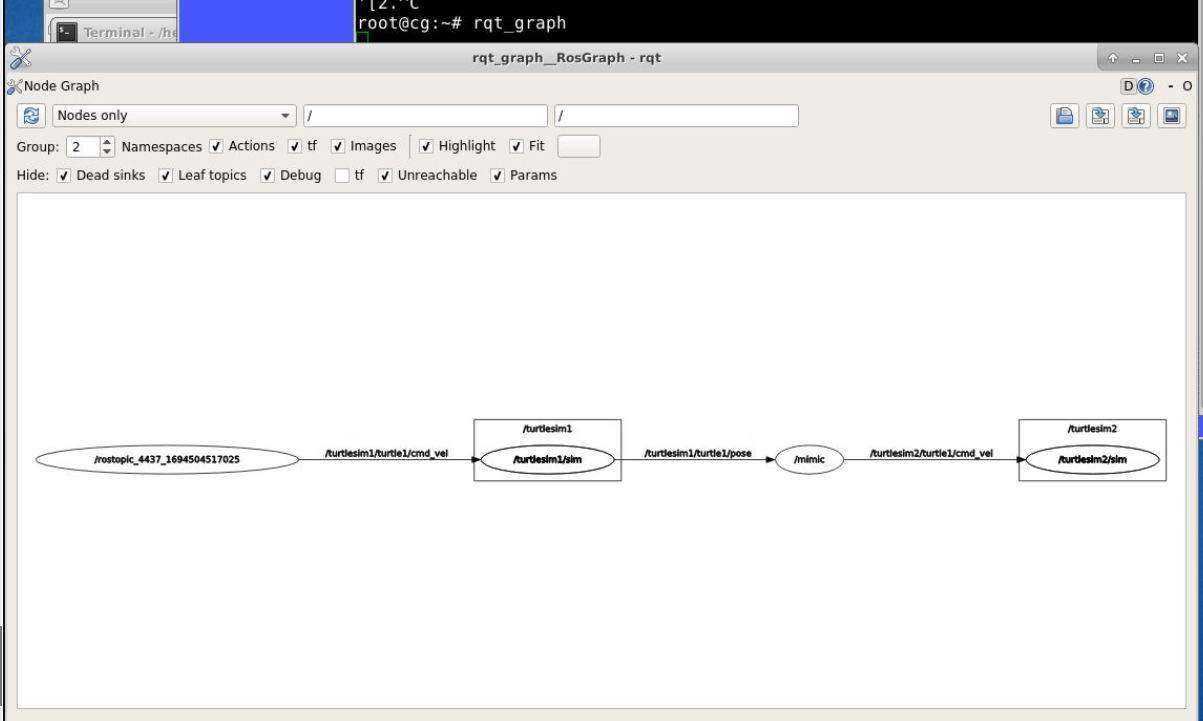
可以通过rqt来更好地理解launch文件,运行rqt_graph。
圆形的就是节点,/minic就是launch文件中新建的模仿节点,输入为turtlesim1的pose,输出为turtlesim2。
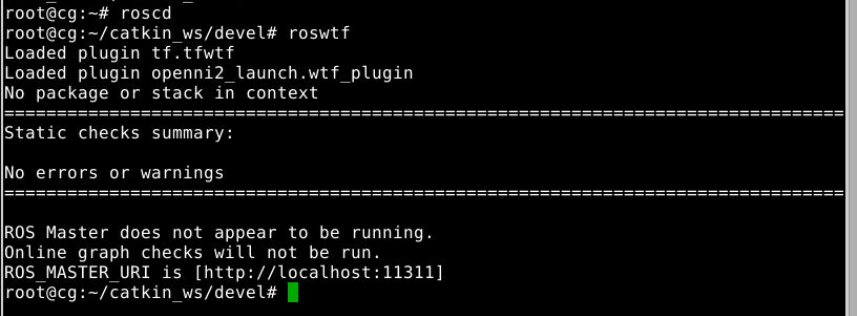
roswtf
安装检查(没有运行roscore)
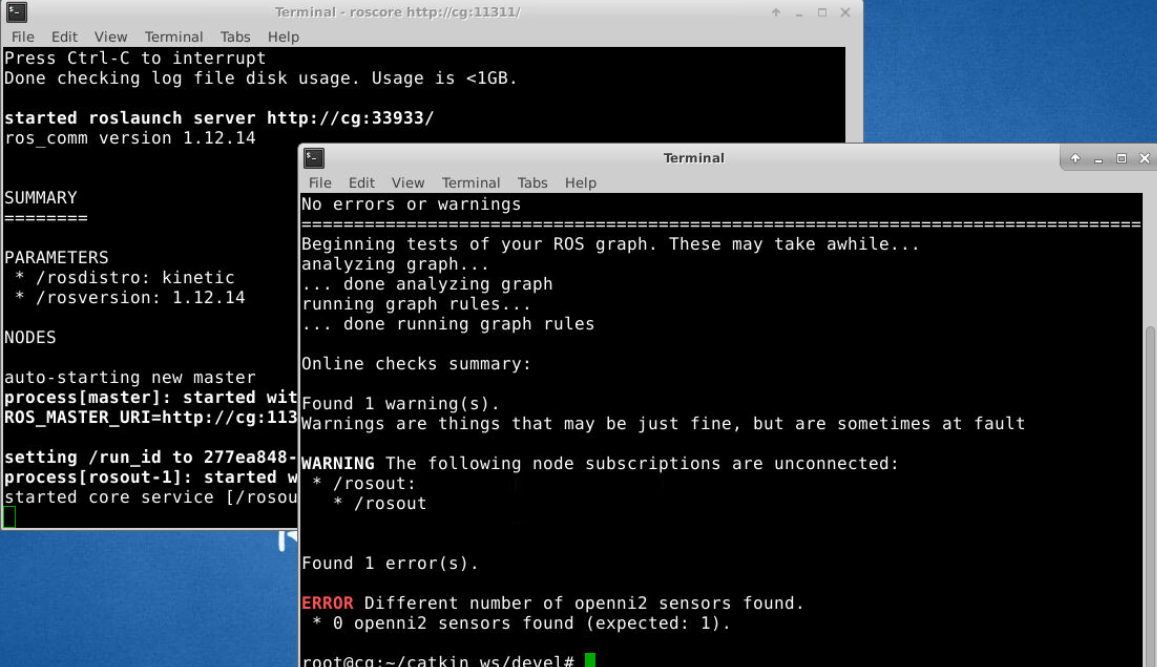
启动roscore后检查
错误报告
- 在
ROS_PACKAGE_PATH环境变量中设置一个 bad值- 显示bad不存在
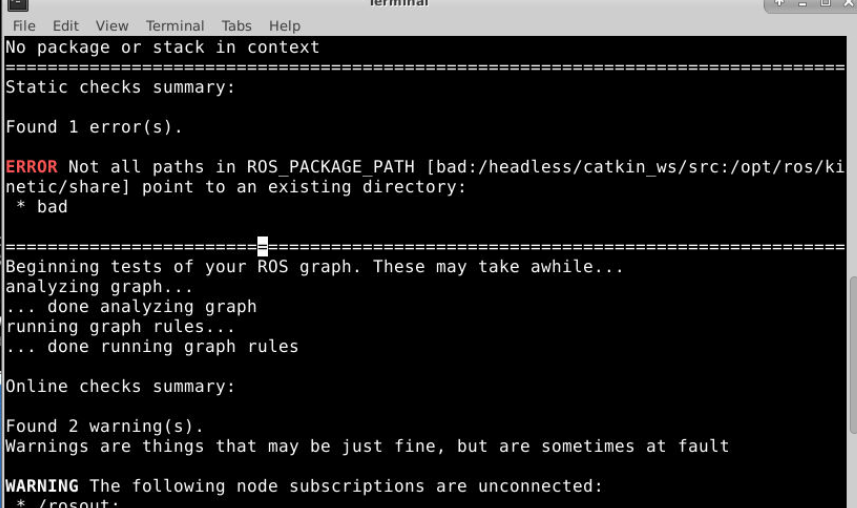
- 显示bad不存在
ROS程序包
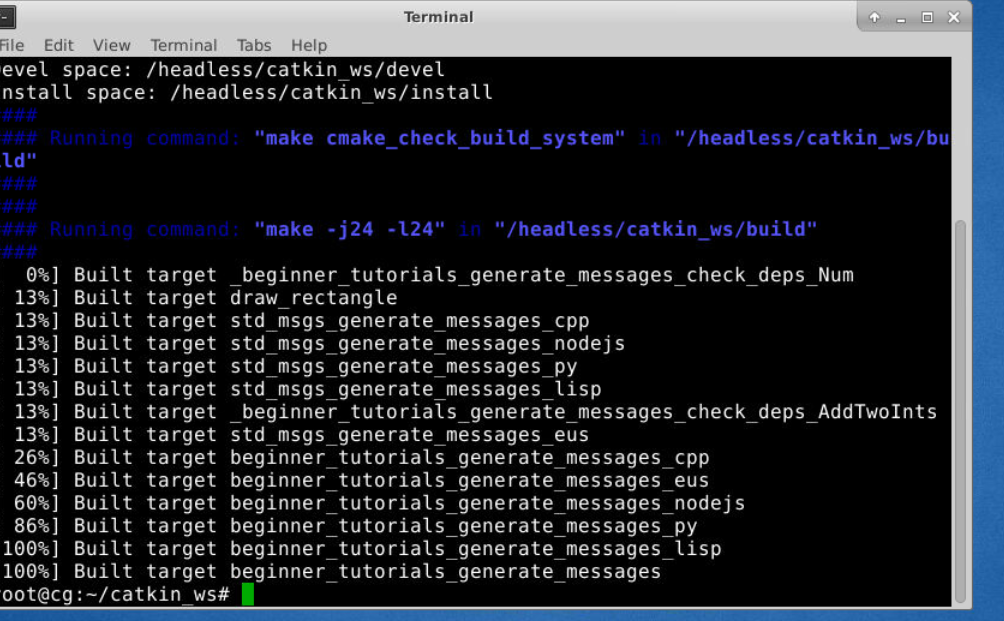
catkin_make
创建beginner_tutorials文件夹
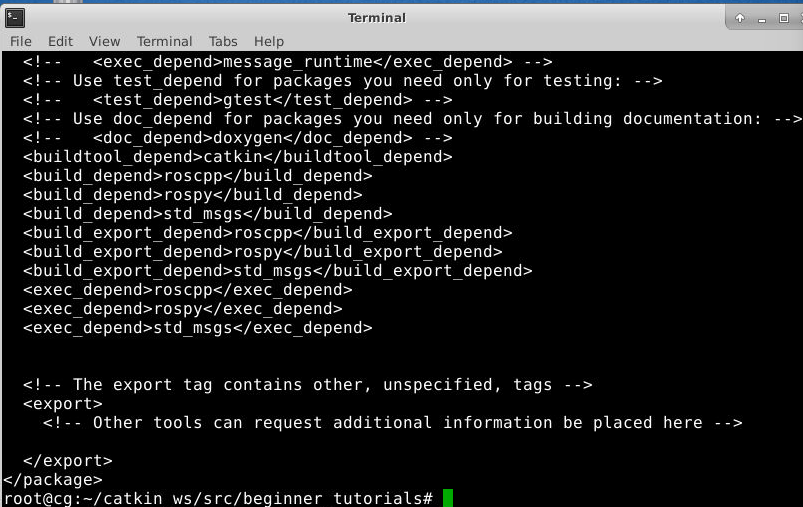
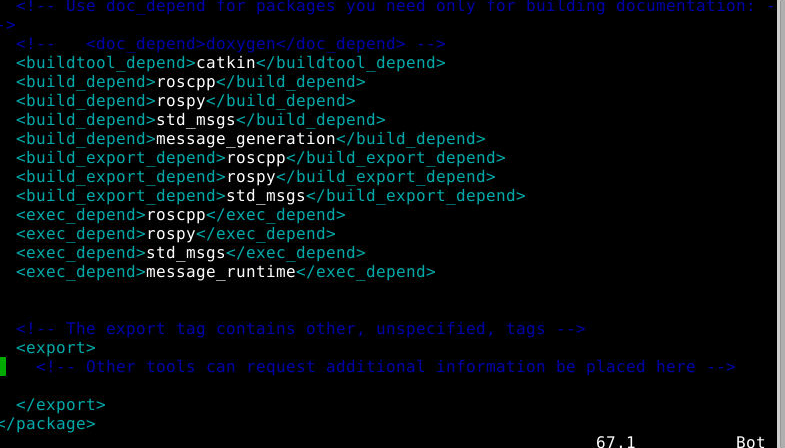
查看程序包依赖关系
所有文件在运行前需要打开roscore
实验6
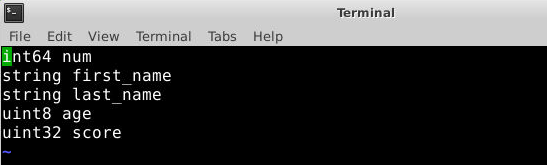
Num.msg
插入build_depend 和exec_depend
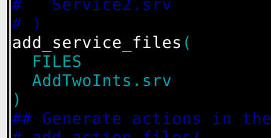
修改CMakeLists.txt
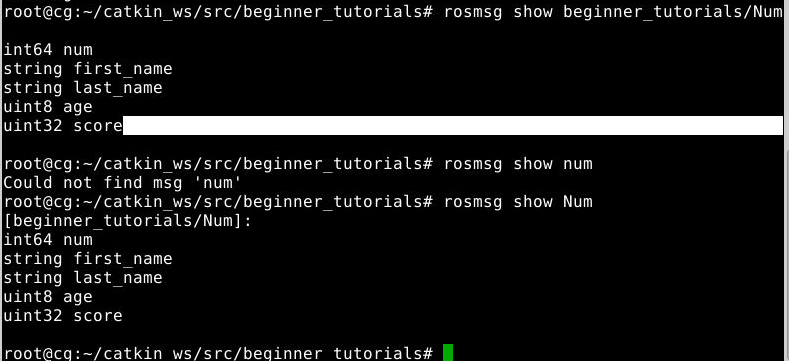
rosmsg show 显示消息
修改CMakeLists.txt
rossrv show 显示消息
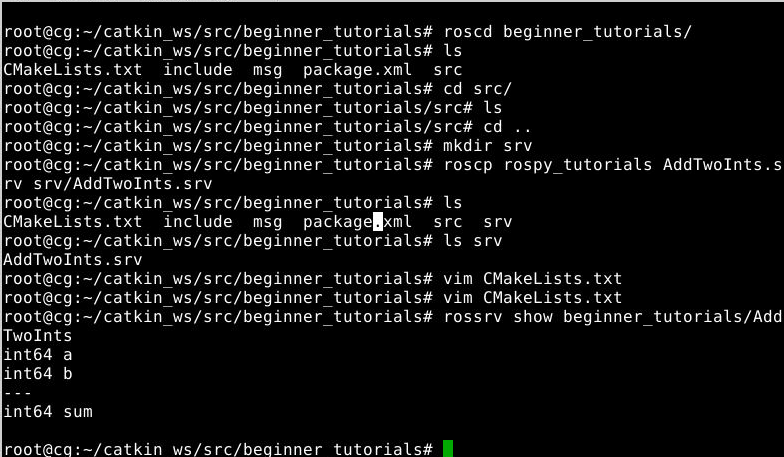
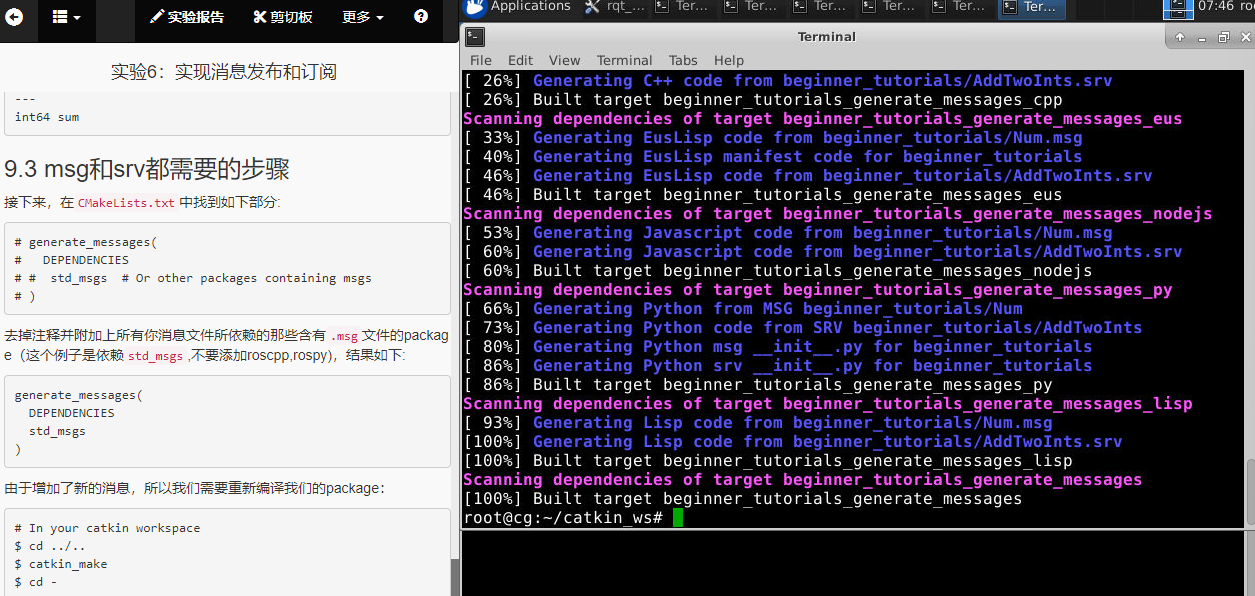
利用catkin_make重新编译
编写简单的服务器和客户端
将代码写入scripts/add_two_ints_server.py
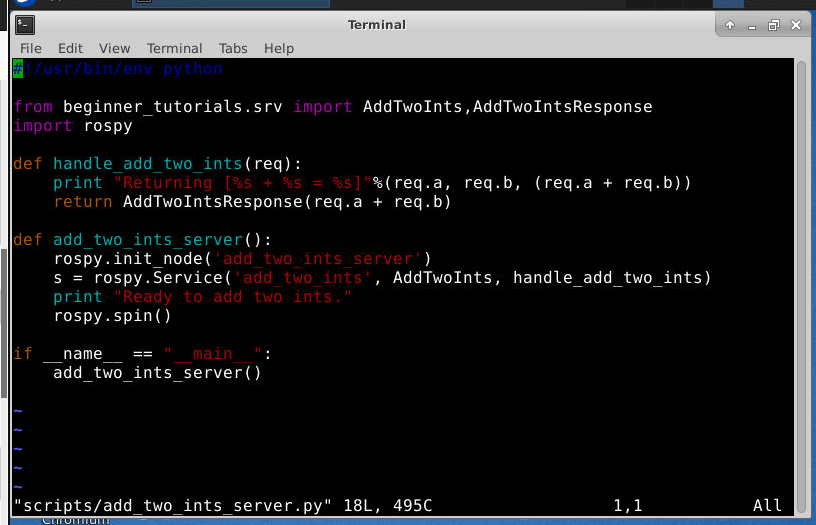
#!/usr/bin/env python
from beginner_tutorials.srv import AddTwoInts,AddTwoIntsResponse
import rospy
def handle_add_two_ints(req):
print "Returning [%s + %s = %s]"%(req.a, req.b, (req.a + req.b))
return AddTwoIntsResponse(req.a + req.b)
def add_two_ints_server():
rospy.init_node('add_two_ints_server')#声明节点
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints)#声明服务 服务类型:AddTwoInts
print "Ready to add two ints."
rospy.spin()#防止代码退出,直到服务关闭“
if __name__ == "__main__":
add_two_ints_server()
编写client节点
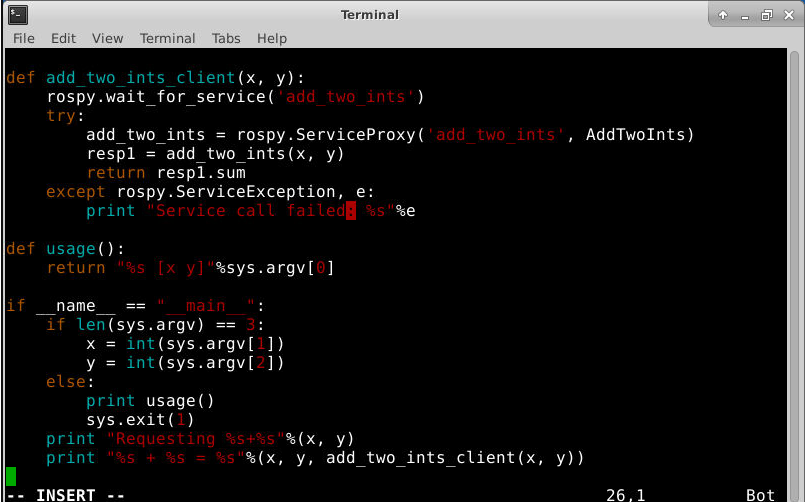
#!/usr/bin/env python
import sys
import rospy
from beginner_tutorials.srv import *
def add_two_ints_client(x, y):
rospy.wait_for_service('add_two_ints') #直到服务器端可用
try:
add_two_ints = rospy.ServiceProxy('add_two_ints', AddTwoInts)
resp1 = add_two_ints(x, y)
return resp1.sum
except rospy.ServiceException, e:
print "Service call failed: %s"%e
def usage():
return "%s [x y]"%sys.argv[0]
if __name__ == "__main__":
if len(sys.argv) == 3:
x = int(sys.argv[1])
y = int(sys.argv[2])
else:
print usage()
sys.exit(1)
print "Requesting %s+%s"%(x, y)
print "%s + %s = %s"%(x, y, add_two_ints_client(x, y))
编译节点
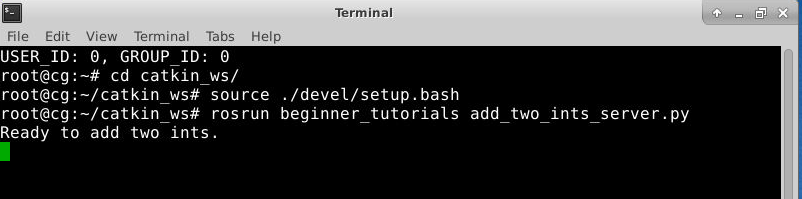
对servicer和client进行测试
启动server
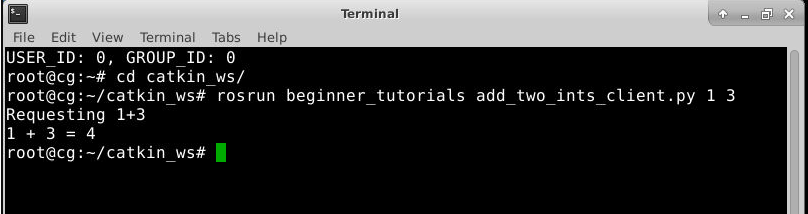
启动client 并测试
 其中server端返回
其中server端返回

录制和回放数据
rosbag
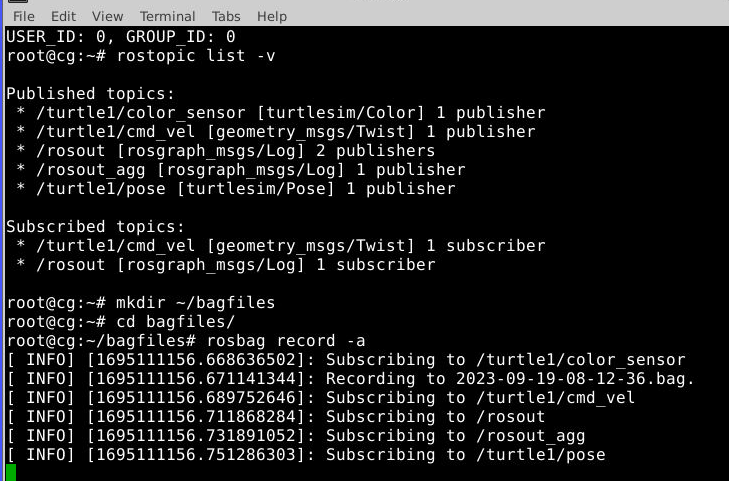 生成记录文件
生成记录文件
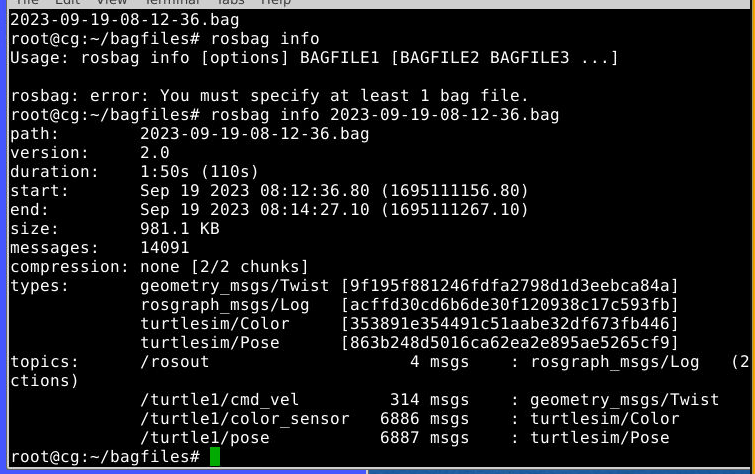
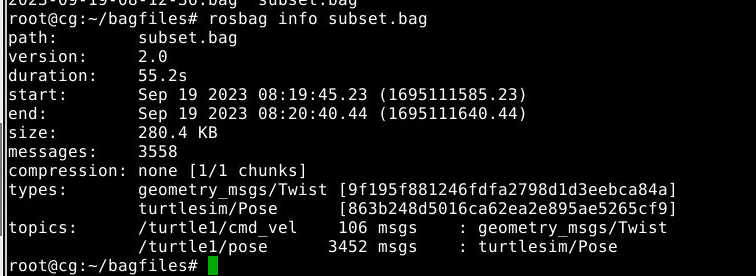
rosbag info
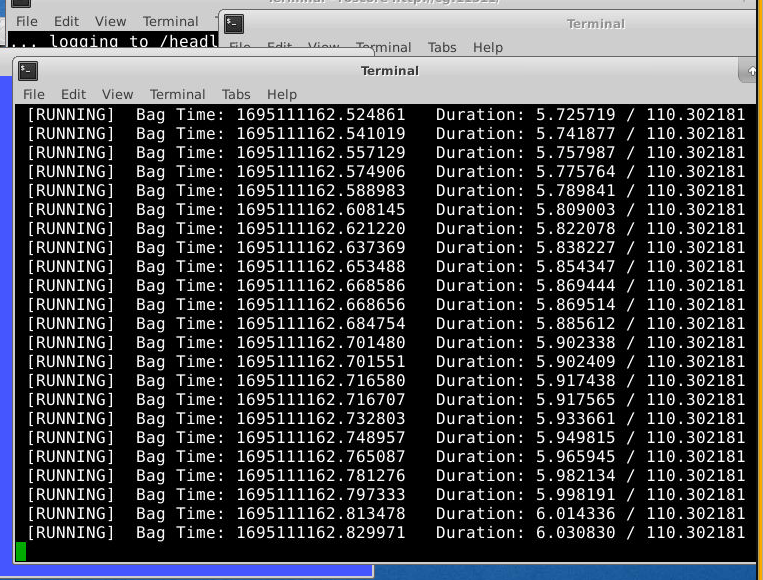
rosbag play xx 乌龟会在没有操控的情况下自动回放
|  |
只录取指定内容
rosbag record -O subset /turtle1/cmd_vel /turtle1/pose
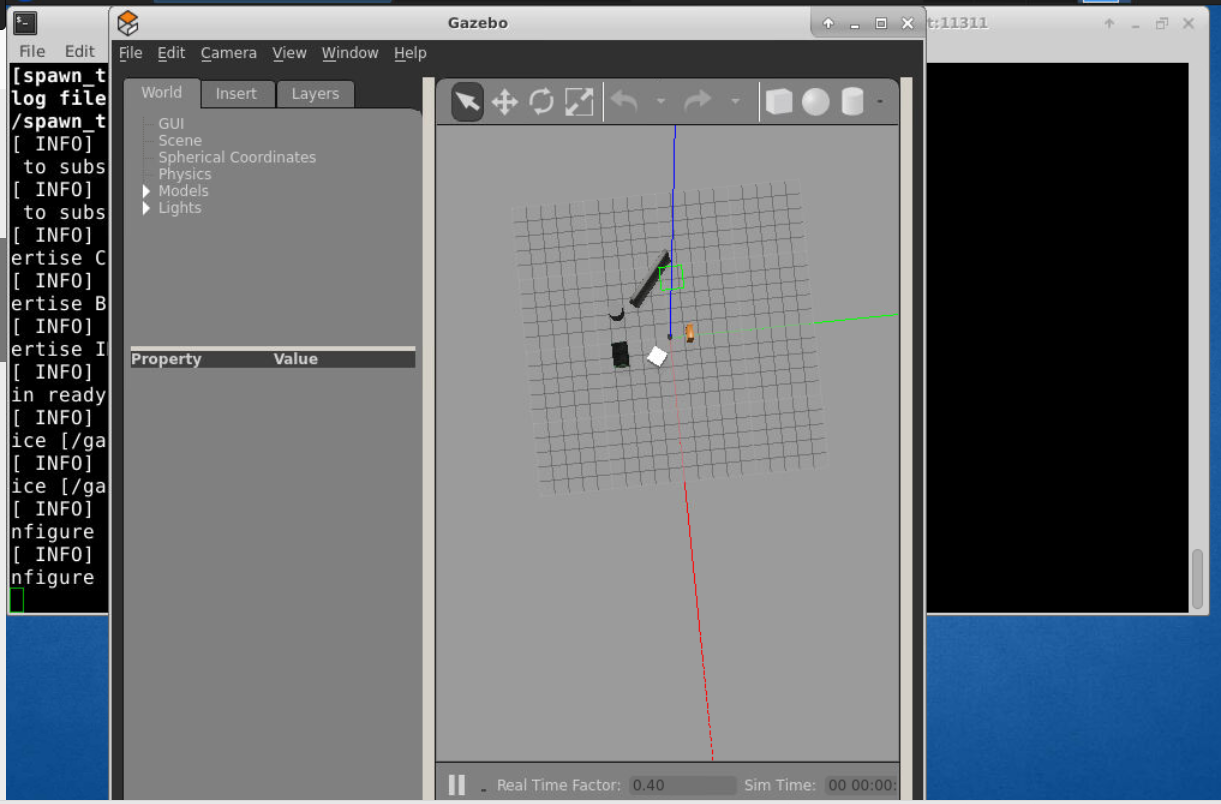
TurtleBot导航仿真
gazebo界面
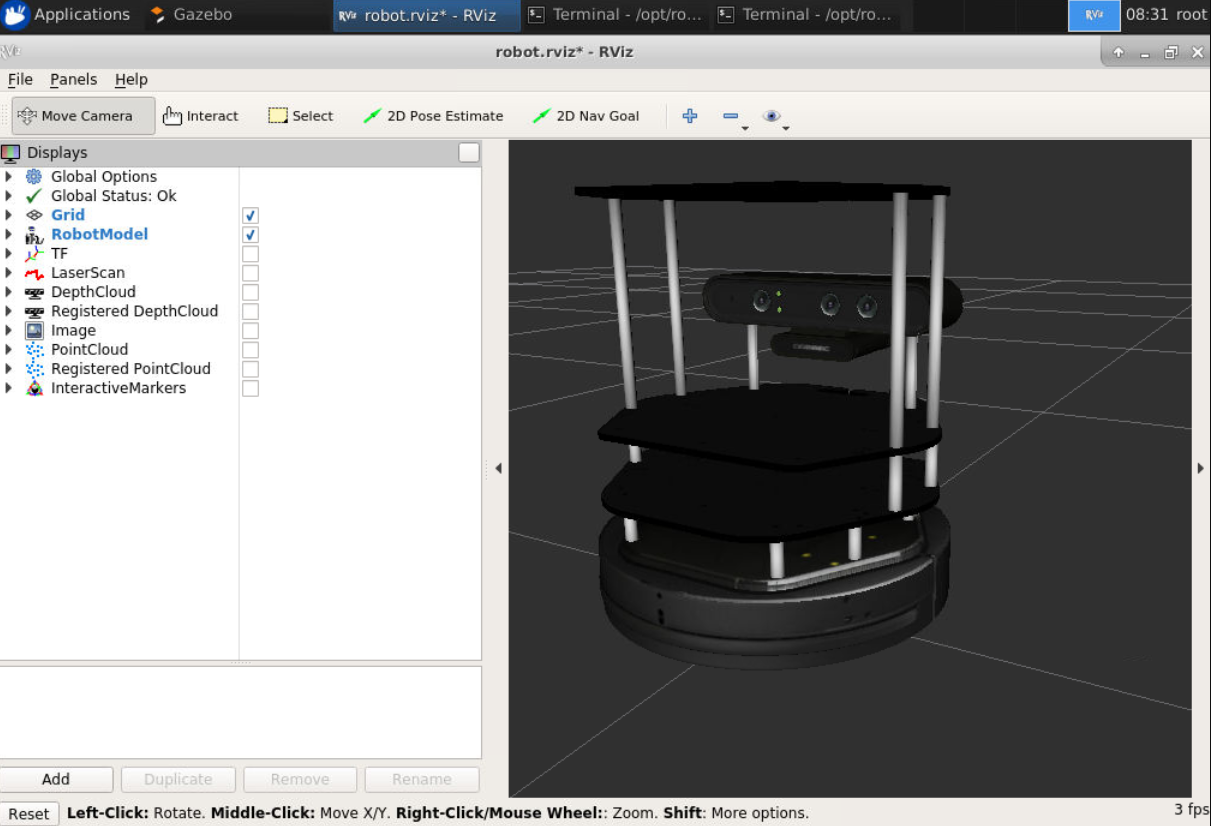
rviz界面
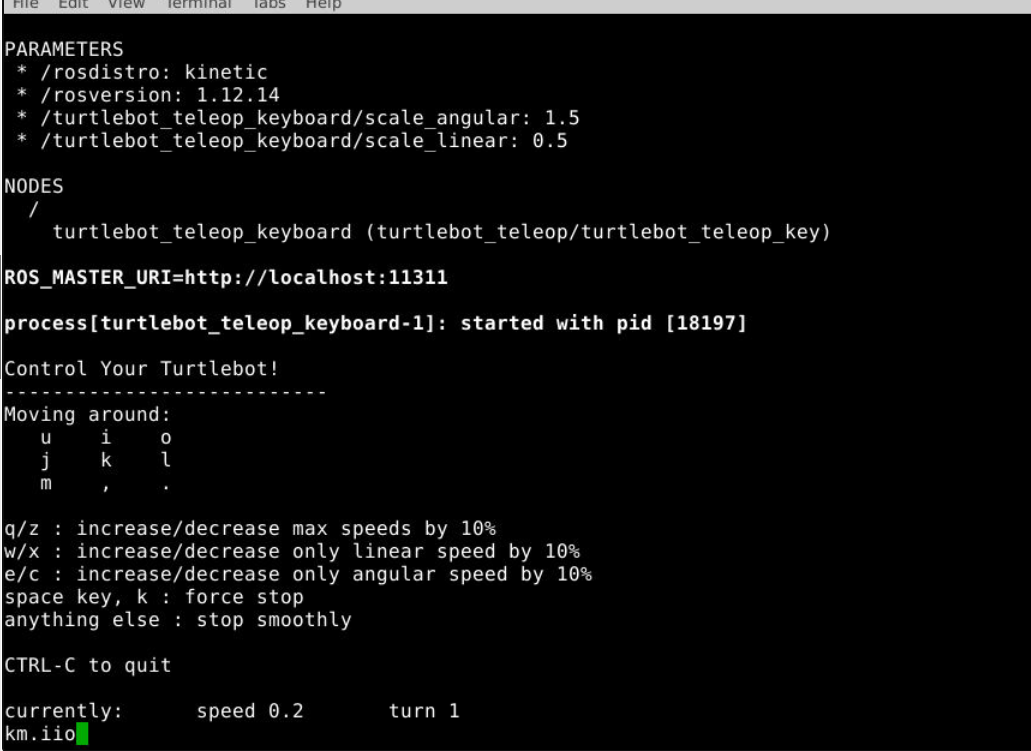
控制机器人移动
jl分别是左右转向,,是前进,i是后退
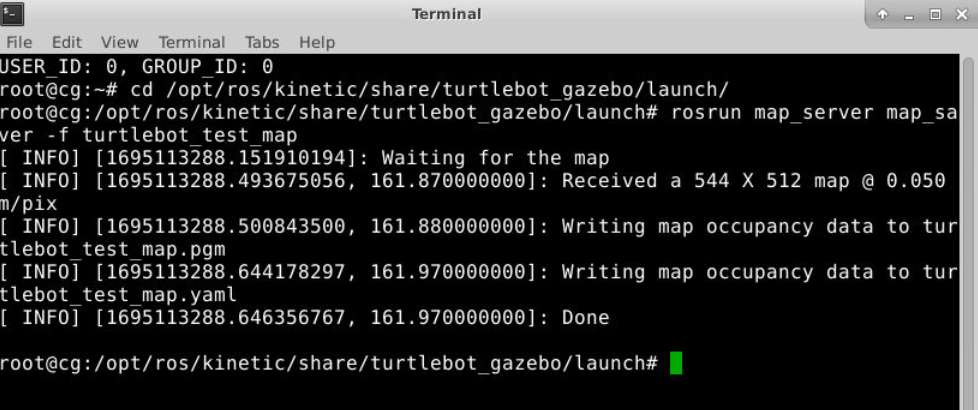
保存地图
发布器和订阅器
发布器源代码
#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)# 使用消息类型字符串发布到聊天主题
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz 创建一个Rate对象rate 每秒循环十次
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str) # 消息被打印到屏幕,它被写入节点的日志文件,并被写入rosout
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
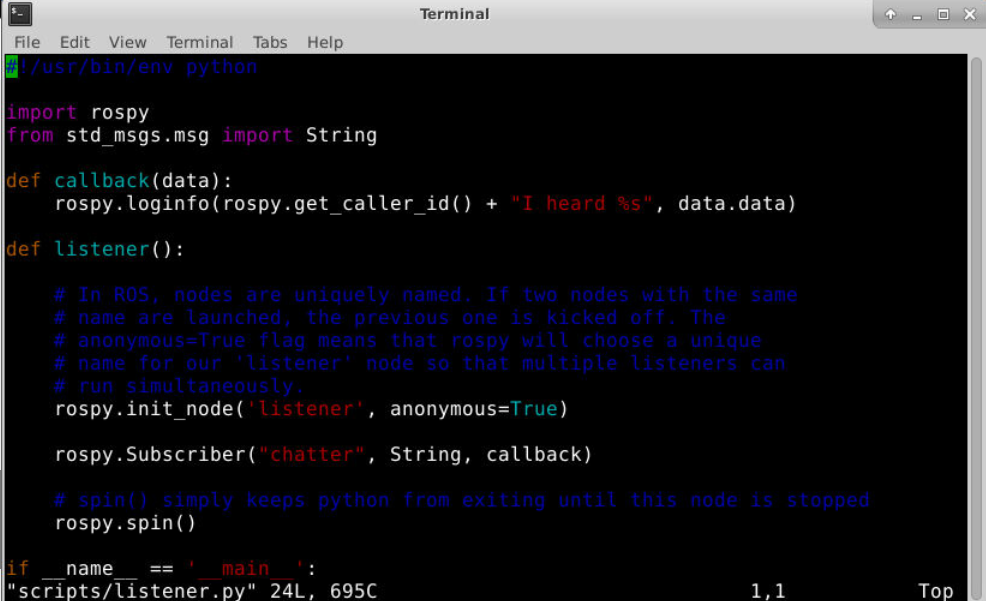
订阅器源代码
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def listener():
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
#这声明你的节点订阅了类型为std_msgs.string的chatter主题。当接收到新消息时,将以消息作为第一个参数调用回调。
rospy.spin()
if __name__ == '__main__':
listener()
编写完代码后进行编译
测试发布器和订阅器
发布器
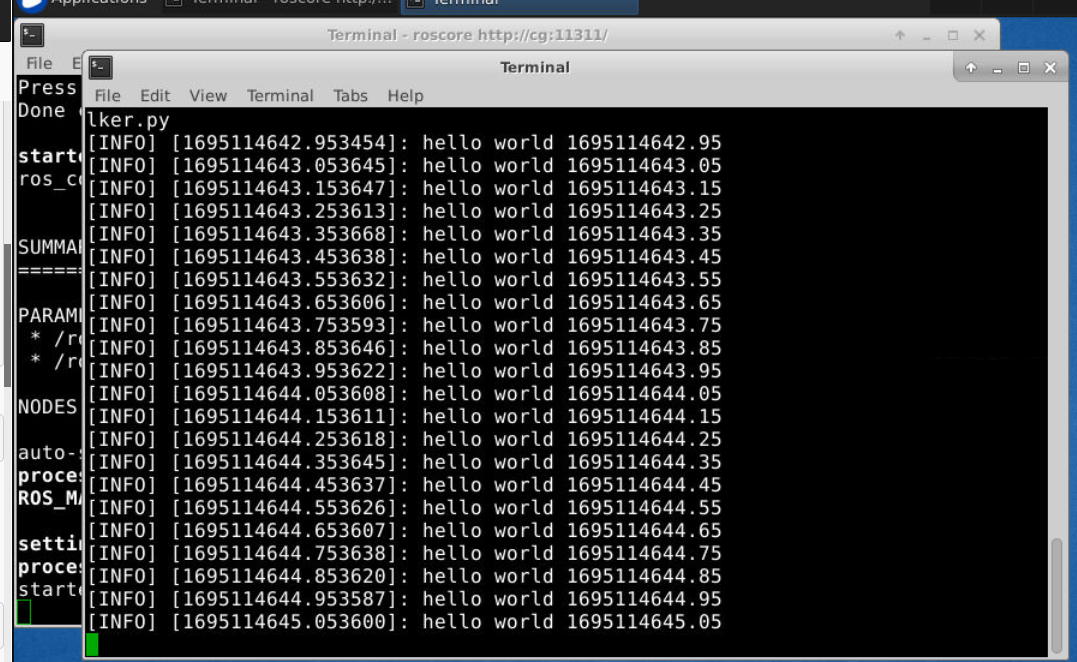
订阅器
This line appears after every note.